I finally finished my T1 VTOL but have not been able to get it in the air so far. There are errors of all kinds (GPS, EKF, IMU…), the craft is rotating, tilting (motor/prop directions are correct) on the ground. I’ve never seen anything similar before on anything I’ve built.
clearly, the GPS is having issues…the EKF is showing very large horizontal position innovations indicating that it cant reconcile the incoming GPS positions with its inertial predictions from the IMUs…and since vibs are low, the IMU predictions should be correct…
either the GPS is wonky or getting electrical or RF interference…that’s all I can dig out of the logs
Thanks a lot, I never would have guessed at the GPS. It’s a brandnew Flywoo GOKU GM10 Pro V3 (with compass), not in the vicinity of any ESC, pretty close however to the Crossfire RX antenna. Not sure if the rather low output when transmitting telemetry would be enough to confuse a GPS, but of course I’ll try placing both further apart.
It just came to my mind however, that some earlier logs, created indoors without GPS lock. also showed signs of nonexistant horizontal movement: Unique Download Link | WeTransfer (discovery courtesy of @andyp1per )
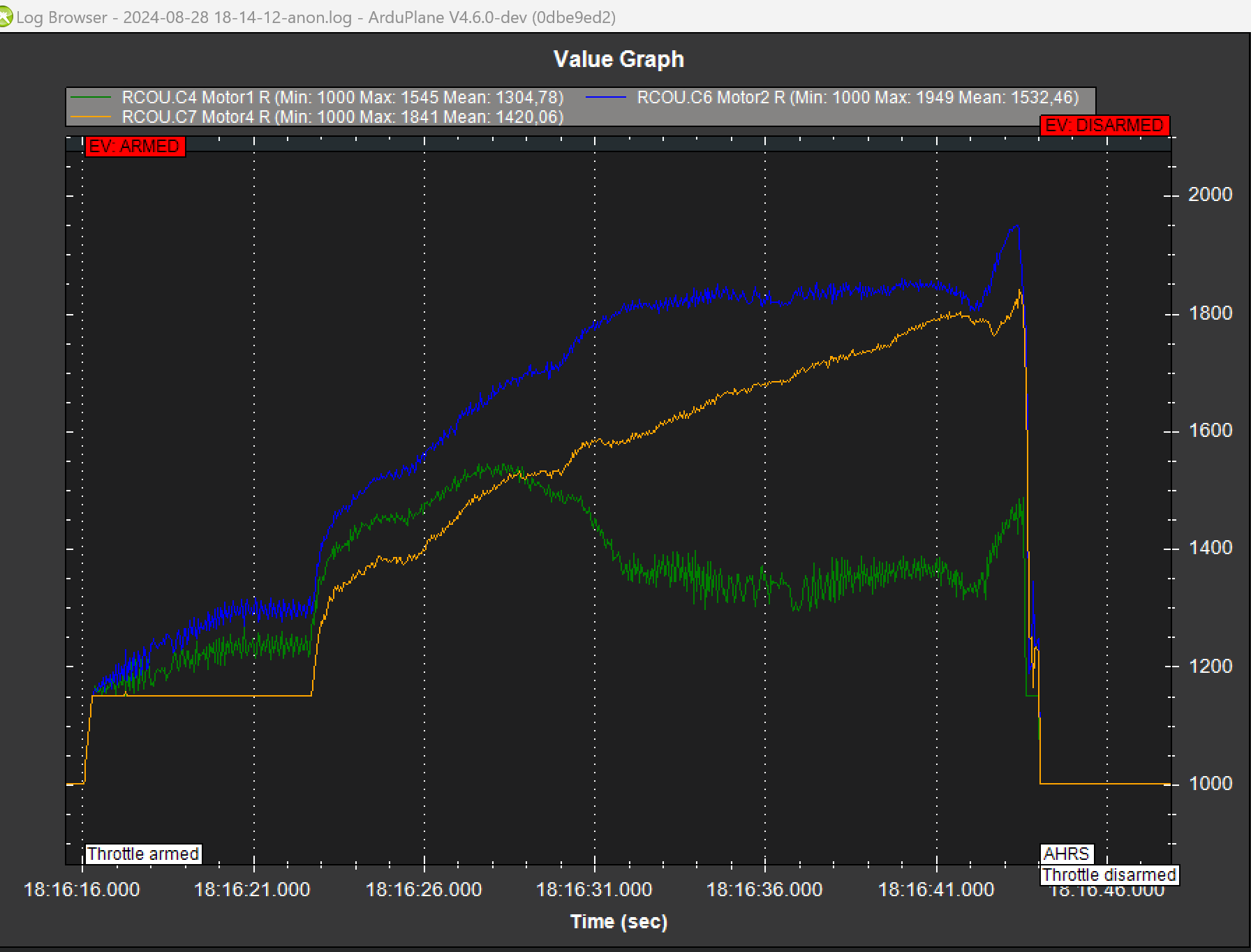
Also check that you have connected motor 1 and motor 2 correctly, that the direction of rotation is correct and that the propellers are mounted correctly. You will notice in the log file that DesRoll and Roll immediately diverge when lifting and that the two front motors are controlled with completely different power. Usually you have similar PWM values on the two front motors when a TRI takes off.
Correct, sorry I forgot to mention this (the whole thing has been going on for weeks) - motor 1 + 2 were indeed still swapped when I recorded this indoor log. I fixed it before taking the T1 outside.
Turns out the assignment was in fact correct indoors:
S4 = left ESC = motor 2 = 34
S6 = right ESC = motor 1 = 33
as per
and has indeed been incorrect since I first took it outside. I thought I had checked it repeatedly
between attempts and can only blame this on increasing frustration with the project, as well as all the other types of errors that came up (EKF).
I can’t understand why the indoor log (with still correct motor config) shows the same effect, but I guess it doesn’t matter now, as the current config is definitely incorrect.
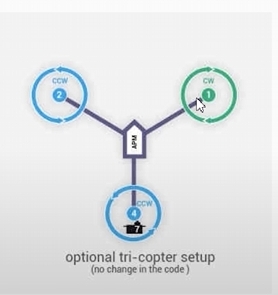
Side note: I placed counter-rotating props on the front motors as shown in the picture and always wondered if there are additional settings to be made because of that but didn’t find anything in Tricopter Configuration — Copter documentation
Will test suggested fixes (GPS/motor) next week and report back. Thanks again!
Opposite motor direction of the frontmotors is obviously, but I would not adopt the direction of rotation from the copter wiki if you interpret the direction of rotation from above. In tiltrotor VTOLS the right motor should be CCW, and left motor CW. The copter is a different matter, as it does not normally have tilt rotors. The reason for this is that during transition while props are not yet vertical, the torque should not work against the rolling movement of the fuselage if an increase in power is required (in order to control roll).
This time it almost looked a bit like flying for the first time (max alt: ~1m), but I wasn’t able to get it into a stable hover. There was some wind too (starting exactly at that time of course), but I’m not sure that’s the only reason. So I’m still grateful for any analysis / hints on what to improve.
You can see that you only climbed to a maximum of 50 cm and then landed again quickly. Presumably because the VTOL started to oscillate around the roll axis?
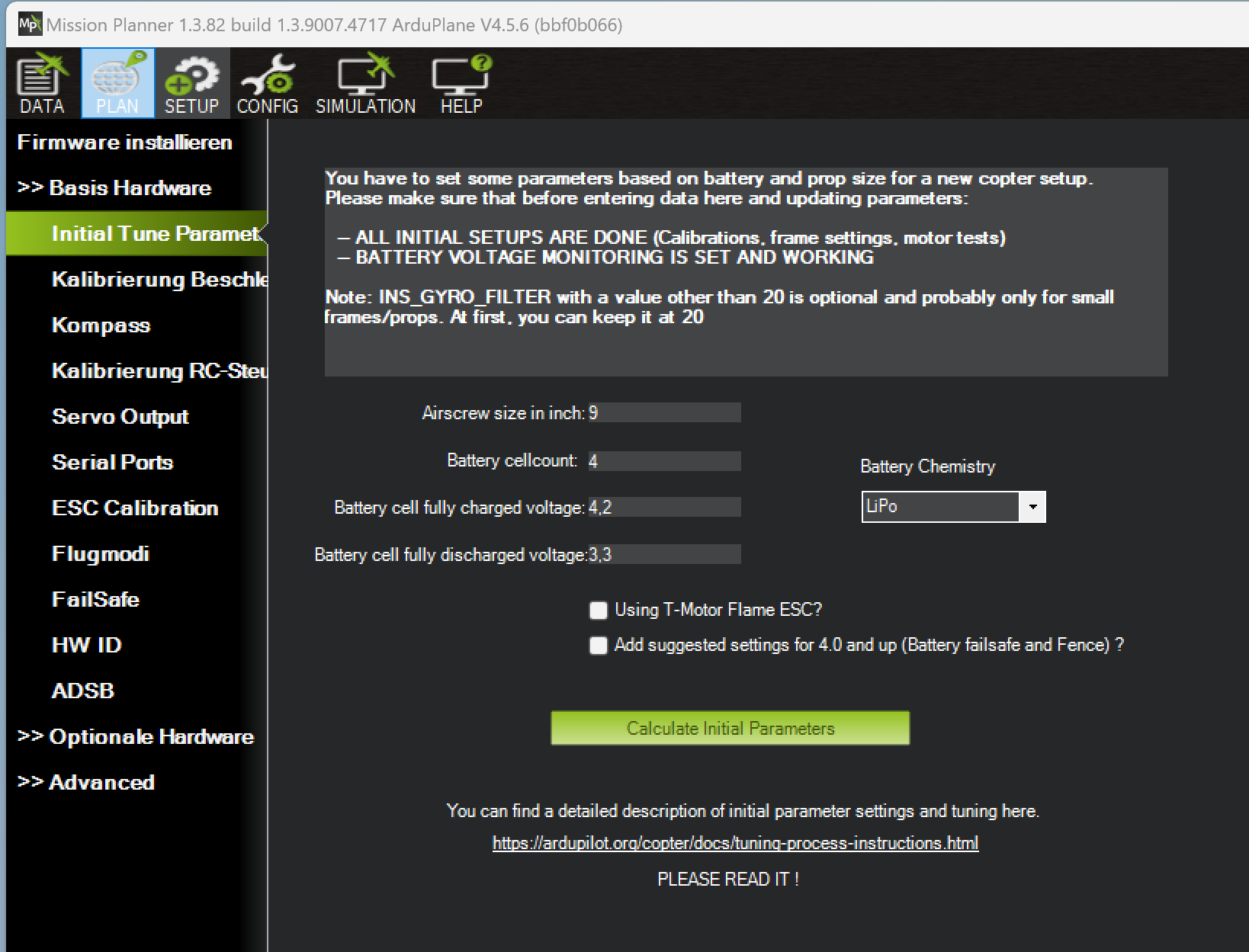
Have you had carried out “Initial Tune Parameter” of the Missionplanner ?
You must proceed according to the instructions in the above linked WIKI-Page , whereby you must note that the parameters that begin with ATC_RAT_… are called Q_A_RAT_… on the VTOLS.
In your case, the roll axis appears to oscillate with increasing amplitude. You should reduce Q_A_RAT_RLL_ P/I/D by 50%.
Something like that, yes, although the direction of oscillation was a bit hard to make out on some attempts. Wind had picked up, pushed the craft towards me, away from the grass and towards concrete surface instead, so I aborted quickly to prevent damage. Here’s a clip (not sure it’s the same attempt as in the log though): Unique Download Link | WeTransfer
Additionally, before I started this thread, @andyp1per and I were already at it, ironing out the worst in the PIDs (first takeoff attempts indoors showed massive fast oscillations), and I also compared my PIDs to his, the aim being able to get the craft to QAUTOTUNE at some point to let it fix the rest by itself.
My Q_A_RAT_RLL_P is already much lower than his (0.05 versus 0.3652097), suggesting I probably already lowered it multiple times, but will set it to 0.025 now, and also half I and D. Looking at the wind forecast, next chance to test will be on Thursday.
Well, here’s a new log after the setup changes, but it might not reveal much, since the situation was the same: Same place, grass area too small, wind pushed it over concrete, aborted.
This time it hovered a little longer before it started rolling left and right again. I’ll just have to try this over a larger field soon, and preferably without any wind at all.
So here comes another log from my nemesis, after more attempts on a bigger field. In short, the craft now always seems to put in reverse gear once in the air. It moves backwards and accelerates, impossible to keep it in the air. Visible oscillations seem to be gone though after reducing the PIDs as instructed.
I checked horizon, it should be level.
Are there maybe any signs of lack of thrust from the tail motor in the log?
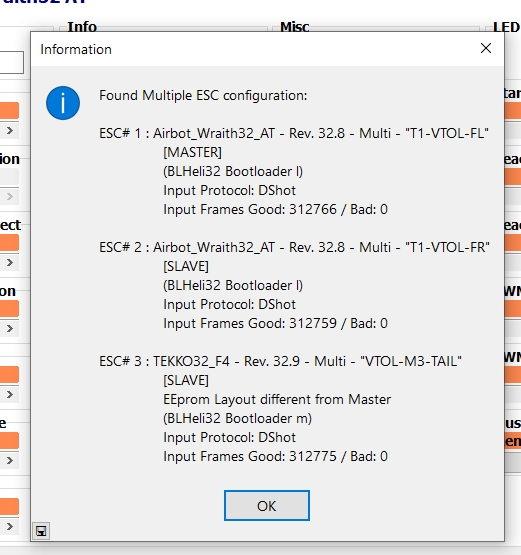
I remembered that a few months ago, after installing the ESCs, I was a bit surprised to see this:
All 3 ESCs came as sealed Holybro Tekko32, yet 2 of them identify as different model. The Airbot Wraith32 looks 100% identical though, in fact I used to buy those before as a Tekko32 replacement.
So I’m just mentioning this, there is no reason I can see why the tail ESC should request less thrust. (All are set to DSHOT600.)
I’m getting doubtful this will ever really fly… months at it and not even a stable hover.
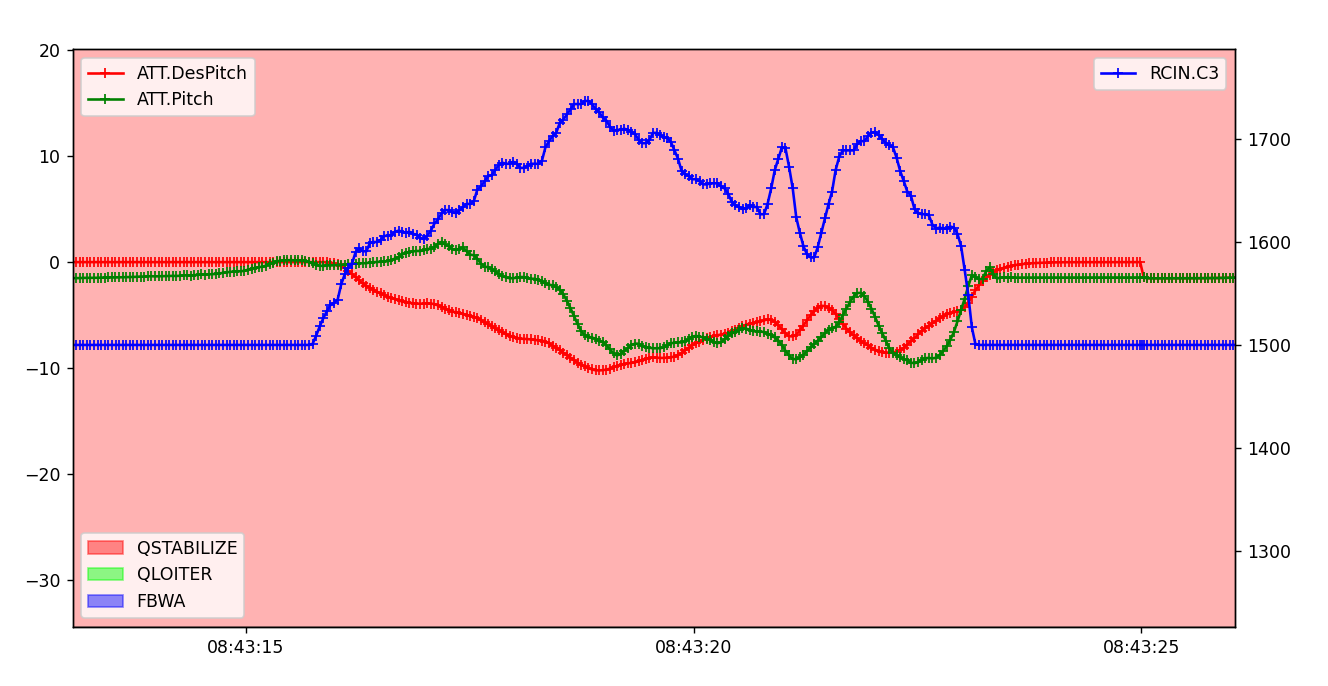
Something isn’t adding up. The log shows the plane pitching forward (negative pitch). I also see the desired pitch tracking the stick input. I see RC3 is reversed so I hope I’m not getting into a game of negatives and overlooking the obvious. Was your stick input controlling the plane or was it still moving backwards?
I built up a T1 VTOL with an F405-VTOL. I only got as far as hover testing before I ripped out the flight controller to put in another controller. The hover tests of mine were good, so I did a comparison of your parameters to my F405-vtol params. I was only focusing on this pitch problem, nothing else.
One thing I noticed was the AHRS_TRIM_Y. Your is 0.098 and mine is -0.018. I’m not used to working in radians so that means yours is +5.6 degrees and mine is -1.1 degrees. It makes me wonder if the board isn’t level for the calibration. To be fair I’ve never looked closely at these values but given the problem I figured it was worth pointing out. I’ll keep poking and see if anything else jumps out.
The plane definitely wants to go backwards, and it did so on every one of the recent attempts. I tried to counter the movement by pitching forward, which didn’t help (but it didn’t speed up the backward motion either). The horizon looks level in OSD. With all my planes and copters running AP, I never had an IMU calibration issue that would persist for weeks - usually a reboot was enough.
Yet even before starting this thread, I was asking @andyp1per for help, since there was movement detected in a log that did not occur - indoors, without GPS lock. So once again I’m starting to wonder if the IMU could simply be faulty?
Because the plane/board was definitely level when booting. On the other hand, would 4.6° degrees of wrongly detected pitch be enough to send the plane straight backwards with no means to stop it?
Something else is weird: I just compared 3 param files from the last hover attempt sessions (back in August + September), and AHRS_TRIM_Y was always exactly 0.09857318 - shouldn’t there be some variance at least in the last digits?
If there’s a real chance it would fix the issue and everything else has been ruled out, I would get another F405-VTOL.
I would think that 5 degrees of pitch would be enough to get movement.
Hopefully I’ll be corrected if I’m wrong, but I think AHRS_TRIM is set during the accel calibration so I wouldn’t expect it to change every start up. (honestly not something I’ve looked at too often)
Have you checked the mechanicals: when you’re in Q-Stab mode, and the tail boom/tail motor is level, are the two front motors also level? Is the center of gravity correct?
If the problem is consistent and repeatable then in this case I don’t think replacing the board is the answer.
This time I was extra careful when re-doing the calibration at home, which led to AHRS_TRIM_Y,0.001047045. (It might be that I was a but misled by the curved shape of the fusilage when I had done it last time, this time I only took the tail boom for reference.)
On boot I also made triple-sure the plane was level. All in all I took more care with the levelling than I ever had to do before with any of my planes and copters. I didn’t change anything else in the config, by the way.
But instead of being more stable, the T1 was more or less uncontrollable, it tumbled through the air, and on the last attempt, even flipped over right after launch, as if stabilization was suddenly inverted.
To put it short, it ‘flies’ even worse than before. Unless there is another explanation, I’m really tempted to file this under hardware (IMU) failure for the winter, and replace the FC next year…
I had also checked the motors, even adjusted the tail one which was very slightly tilted, probably from all the failed attempts. About CG, I was using a 4S 1300 mAh Lipo for all the testing, not much space to move it around. But as long as it’s ‘copter mode’ it shouldn’t matter much I guess? To be honest, I have even flown nose-heavy Arduplanes and still none ever crashed.