Dude after you set your servo 9-12 to motors 33-36 you have to scroll through your Parameters to servo 1 to 4 and set those to 0/Disable. When you first install Arducopter on your autopilot, Servo’s 1 to 4 are set to motors 33 to 36 , so you must set Servo’s 1 to 4 to 0/Disable after you set your servo’s 9 to 12 . Does that make sense . After I set my params Servo’s 1 to 4 to 0/ Disable, the correct Protocol registered in BL Heli suite32
Went and checked as I thought that was already done. Yup, 1 to 4 are set to 0. But after setting low rpm protect to off (which I’m pretty sure I did already), the drone flies awesome… But still oneshot24 lol!
well the important thing is that it flies well, have fun
Can you explain your pinout from this to the power plug on the controller? I understand the motor connectors, but the pixhawk 2.4.8 has the below power in - not sure how to connect the two.
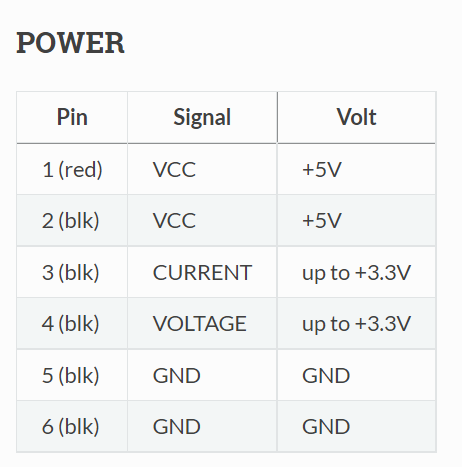
A 4-in1 ESC is not suitable for powering the pixhawk.
They have a vbat output - the full unfiltered battery voltage, where as the pixhawk or any flight controller needs a very regulated 5 volts DC.
For the current and voltage sensing inputs, you may be able to use the current sense from the 4-in1 directly with the correct parameters.
To use the voltage sensing you will need to construct and add a simple voltage divider to the 4-in-1 vbat output to feed into the pixhawk voltage sense.
OR
just use a normal power brick for those.
Hi, could you give me how u wirinh those esc to pixhawk?