I’m trying to connect T-Motor 45A V2 4in1 ESC to the Pixhawk 2.4.8 . It has Telemetry and current output. I’m running 4.0.7 Arducopter and have all the setting set for BL Heli passthrough ,on the AUX Servos 9-12. I know the T-motor ESC is supported on BL Heli 32 Suite , it’s in the update History. I keep getting this error when trying to connect to BL Heli 32 suite.
If anyone has any ideas it would be appreciated , Thank you in advance.
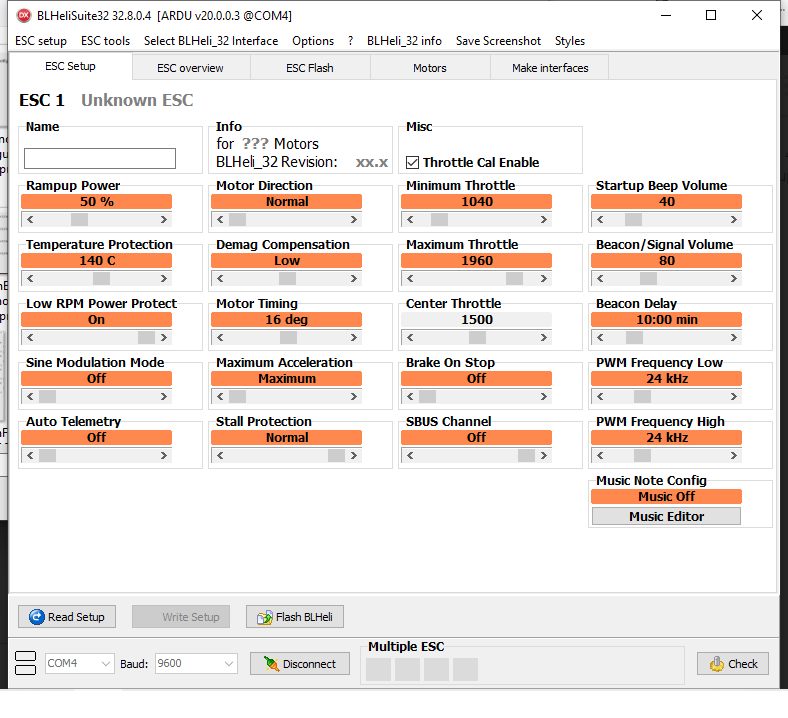
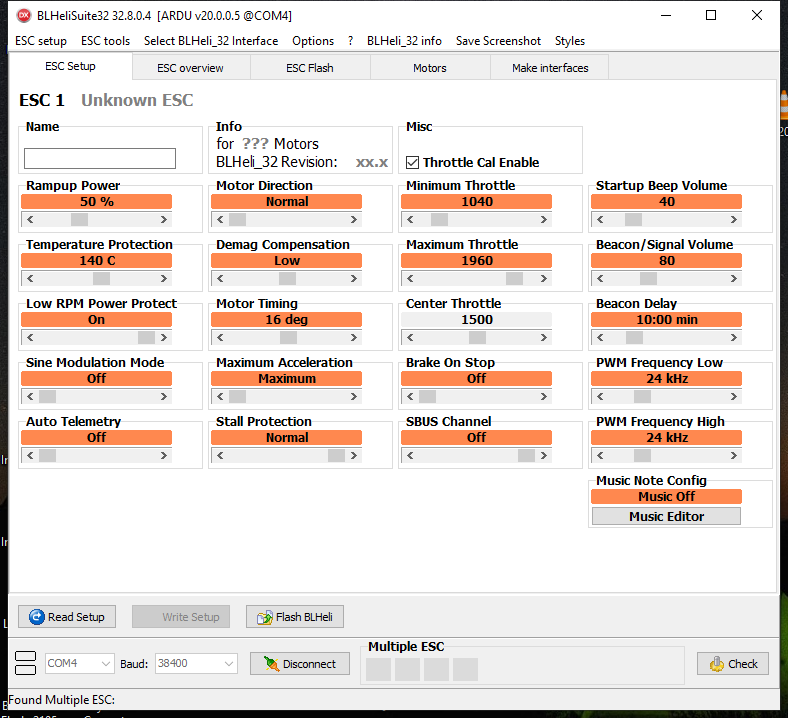
What version of BLHeliSuite and Arducopter? This is an example of a working connection.
I’m using BLHeli 32 suite 32.8.0.4 and ARDU v20.0.0.3 this on Copter 4.0.7 . I tried and used 4.1.0 BETA firmware when i used that version in BLHeli suite it came up as ARDUv20.0.0.5 .
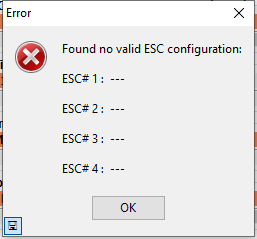
On the 20.0.0.3 from the 4.0.7 this error comes up
and
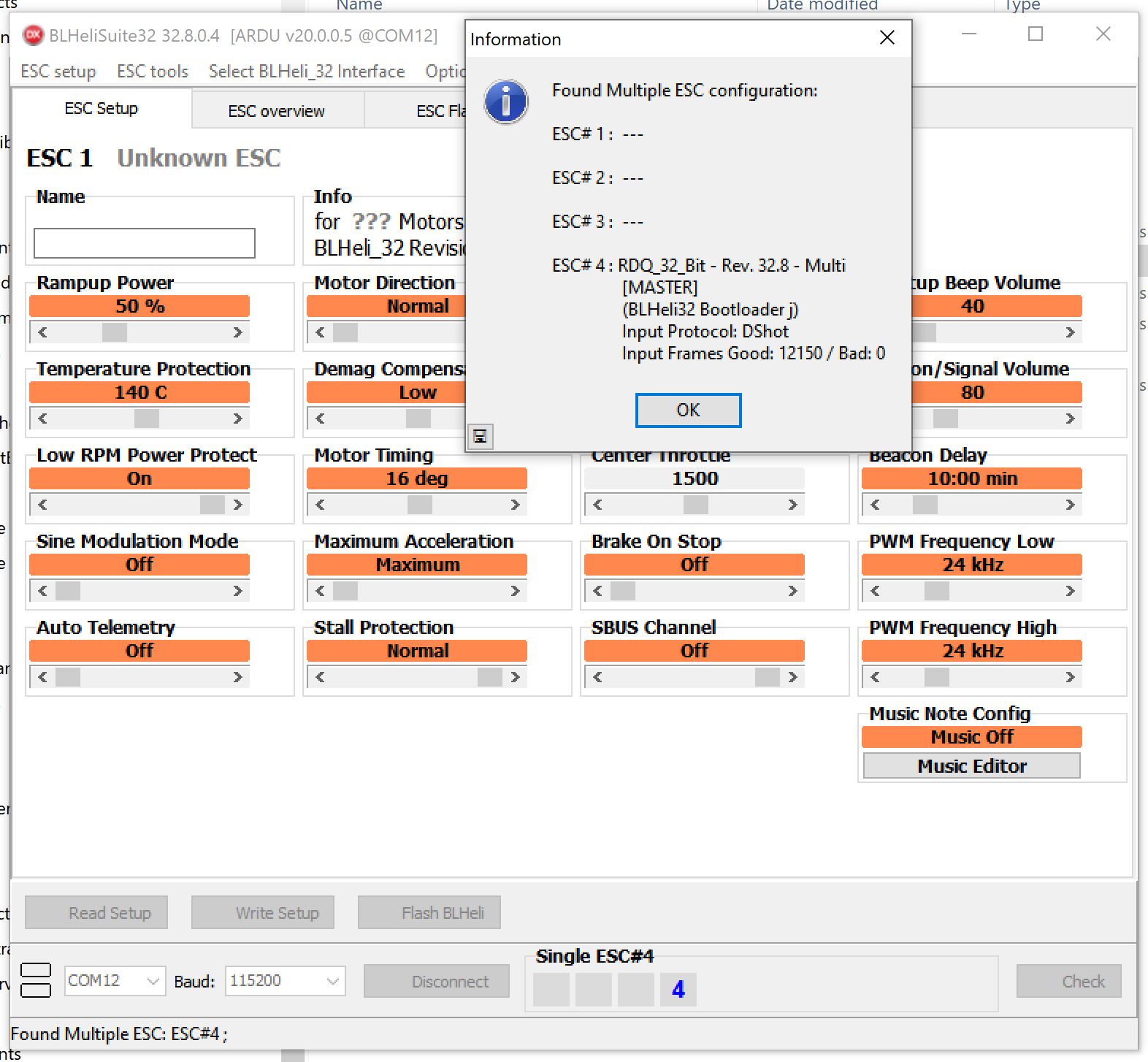
Then on 4.1.0 with v20.0.0.5 I get this
2021-05-25 1:56:55 PM : Frame: QUAD
2021-05-25 1:56:55 PM : RCOut: PWM:1-8 DS150:9-12
2021-05-25 1:56:55 PM : fmuv3 00430037 52565017 2036394B
2021-05-25 1:56:55 PM : ChibiOS: d4fce84e
2021-05-25 1:56:55 PM : ArduCopter V4.0.7 (0bb18a15)
2021-05-25 1:56:54 PM : Frame: QUAD
2021-05-25 1:56:54 PM : RCOut: PWM:1-8 DS150:9-12
2021-05-25 1:56:54 PM : fmuv3 00430037 52565017 2036394B
2021-05-25 1:56:54 PM : ChibiOS: d4fce84e
2021-05-25 1:56:54 PM : ArduCopter V4.0.7 (0bb18a15)
I have tried all the DSHOT 150,300,600,1200 still no luck.
FWIW passthrough in 4.0.x is pretty unreliable, there have been a number of fixes in 4.1 that make it a lot better
I’ve double checked the wiring harness from input to output pins and it’s perfect ,so the connection from Pixhawk to ESC is good. When I plug the ESC XT60 connector to Battery I get three tones from ESC in progressing pitch , I’m assuming that means it’s ok.
I connected a (1) BLHeli_32 ESC to a Bench Pixhawk configured for Dshot600 and running V4.1.0-Beta3 and it works OK. This is an old 1Mb Pixhawk using the Pixhawk1-1M target and a generic BLHeli_32 ESC.
Ok this Pixhawk came with instructions stating only FMUv3 firmware should be installed, which is what I’ve done. So which beta Firmware should I try, this pixhawk has the 2mb flash chip. 0
There is the fmuv3 and fmuv3-heli on ardupilot.org , not sure which one to try.
Pixhawk1 but I doubt that will make any difference because of this line from the Hwdef file:
include …/fmuv3/hwdef.dat
Heli is Traditional Helicopter, you don’t want that.
ok so heli refers to helicopter, duh . So what did you mean by the first part Hwdef file:
include …/fmuv3/hwdef.dat
Here is the Hardware Definition file for the Pixhawk. It includes all of the contents from the fmuv3 target with a few changes/additions. You can try it but it wouldn’t seem to adress the problem you are having.
do you think I might need a different ESC , or 4 separate ESC’s or is the Pixhawk version i have not right.
Plenty of people have got passthru working with those 2.4.8’s . Did you try Master (4.1.0-dev)?
Where can i download that , do you have a link.
No need. From Mission Planners Install Firmware Screen hit Ctrl<Q and it will populate with the latest Dev version. Pick the vehicle graphic as usual after that.
ok I will try that , but one question can an ESC that supports BL Heli 32 also work in PWM mode probably a dumb question.
Sure, no problem with that. And it could be working in Dshot mode anyway whether passthru works or not. Does ESC telemetry work?
So i tried the 4.1.0 DEV version and this what i get
and this
this from data
2021-05-25 6:54:26 PM : PreArm: Battery 1 low voltage failsafe
2021-05-25 6:54:26 PM : PreArm: Compass 2 not Found
2021-05-25 6:54:26 PM : PreArm: Compass 2 not Found
2021-05-25 6:54:26 PM : PreArm: 3D Accel calibration needed
2021-05-25 6:54:26 PM : PreArm: Hardware safety switch
2021-05-25 6:54:25 PM : EKF3 IMU0 is using GPS
2021-05-25 6:54:03 PM : u-blox 1 HW: 00080000 SW: ROM CORE 3.01 (107888)
2021-05-25 6:54:01 PM : GPS: u-blox 1 saving config
2021-05-25 6:53:57 PM : EKF3 IMU0 origin set
2021-05-25 6:53:56 PM : PreArm: Battery 1 low voltage failsafe
2021-05-25 6:53:56 PM : PreArm: Compass 2 not Found
2021-05-25 6:53:56 PM : PreArm: Compass 2 not Found
2021-05-25 6:53:56 PM : PreArm: 3D Accel calibration needed
2021-05-25 6:53:56 PM : PreArm: Hardware safety switch
2021-05-25 6:53:50 PM : Frame: QUAD/V
2021-05-25 6:53:50 PM : IMU0: fast sampling enabled 8.0kHz/1.0kHz
2021-05-25 6:53:50 PM : RCOut: PWM:1-8 DS150:9-12
2021-05-25 6:53:50 PM : fmuv3 00430037 52565017 2036394B
2021-05-25 6:53:50 PM : ChibiOS: 08877972
2021-05-25 6:53:50 PM : Frame: QUAD/V
2021-05-25 6:53:50 PM : IMU0: fast sampling enabled 8.0kHz/1.0kHz
2021-05-25 6:53:50 PM : RCOut: PWM:1-8 DS150:9-12
2021-05-25 6:53:50 PM : fmuv3 00430037 52565017 2036394B
2021-05-25 6:53:50 PM : ChibiOS: 08877972
another question when performing the ESC connecting to BL Heli suite , I plug the USB into pc from Pixhawk , then load BL Heli suite ,then plug power to ESC , then press connect on BL Heli Suite , is this correct
Yea, you just have to connect battery power before you hit the Read Setup button. So I suppose it’s a problem between Ardupilot and that ESC. I have an Aikon 4in1 where passthru didn’t work for awhile. And then an Arducopter release came out and it did.
What version of firmware did that ESC come with? Did you try connecting before updating it?
I think it was 32.6 , the funny thing is I actually had it connected before when I first started to play with BL Heli suite . It read the ESC perfectly and I was able upload the newest firmware 32.8 , everything seemed to be working ok but every time I read the ESC the Master ESC would say input protocol: OneShot24 and the other slave ESC’s would say Input Protocol: Unknown when I had it set to Dshot , i tried all the speeds , it didn’t change
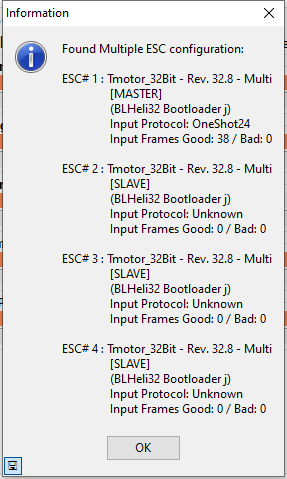
so I don’t know what happened since then
so to use the ESC in PWM mode I would return the Passthrough settings back to normal and connect ESC via Main Ports 1234