It is linear for Alpha and Flame
Thanks Mark, will try that and let you know the performance.
The integrated series uses Alpha series as far as I know.
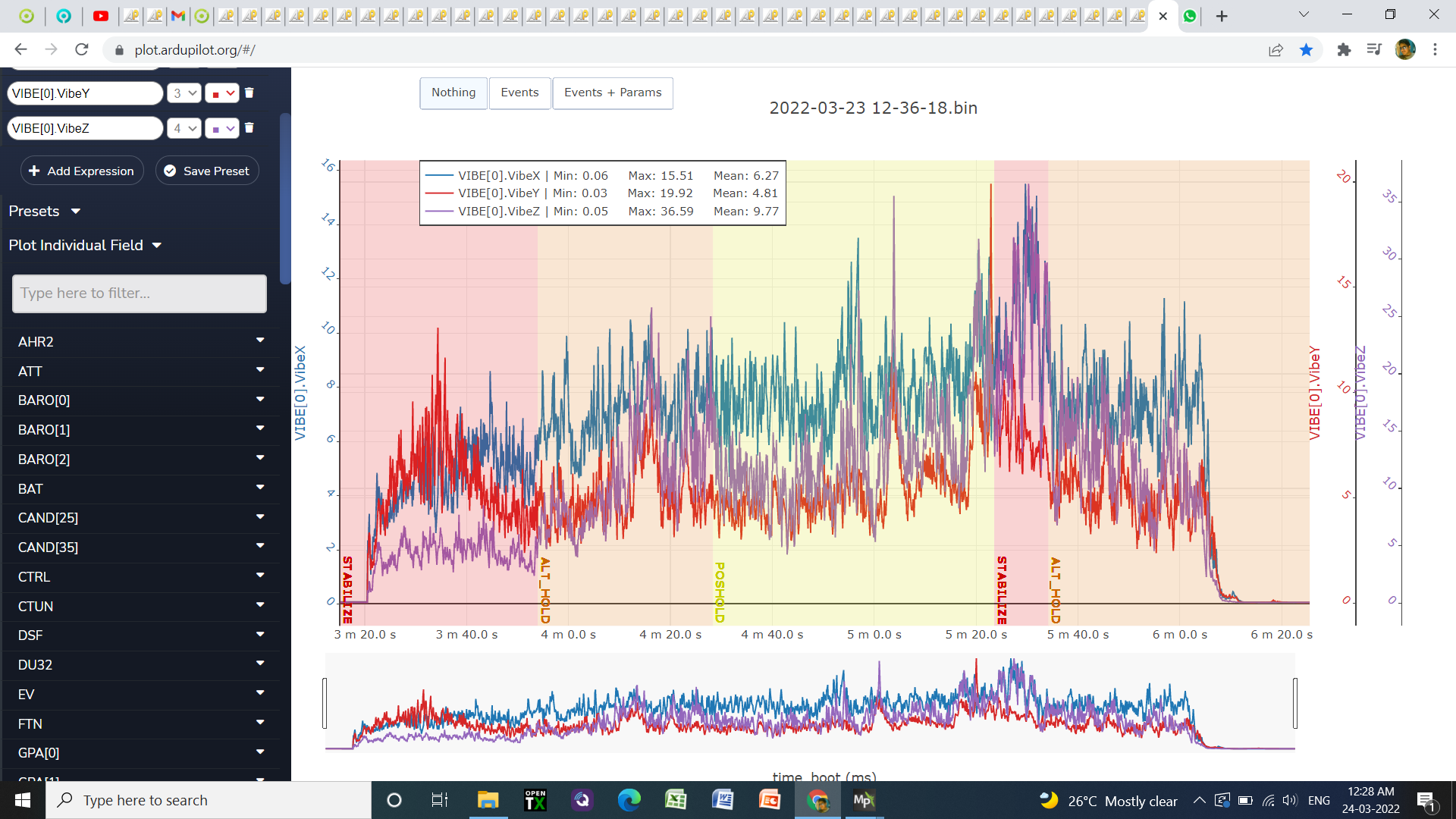
I understand this but peaks of 20 that last less than one second is different than constant vibrations over 20 the entire flight. The latter might cause some issues. Instantaneous peaks when coming to a quick stop should be fine.
Okay, that makes sense. Thanks for sharing your experience.
Thanks Yasin for your comments and suggestions.
I don’t have a thrust measurement setup and it will take time to either build or buy one. What will be your suggestion for mot_thrst_expo that I should try and how to verify whether that is the required value… I mean can I change from 0.6 to 0.2 with 0.1 gap and then find a good point and then narrow it down to something that fits my quad best. Is this feasible? And how would I have that I have got what I wanted
This is what T-motor told me directly when I asked them about thrust linearization. That neither the Alpha or Flame provide that.
Thanks Dave for the crisp answer. Will get a thrust measurement setup and solve this problem with confidence.
As suggested by @manavgandhi17, I had packed the pixhawk and had given sponge vents at the bottom (for air pressure to equalise and for the turbulence to die). I flew it at 4m/s but still saw a real dip of over a meter dip in altitude of the quad while the HUD showed no dip. Please suggest any parameters change or any other change that would help me to overcome this.
The autotune has generated some value of yaw that is messing up with controls… When left in POS Hold mode the quad starts to oscillate in diagonal axis after 8-10 secs… When given an input the behavior goes off… But when left uncommanded the thing repeats. Anyone have experienced such behavior? . And what is the best method to go about solving this.
Please feel free to suggest… I am ready to even experiment with it.


no .bin files, no cookie!!
1 Like
This may have nothing to do with it, but you’ve set:
INS_ACCEL_FILTER 20
INS_GYRO_FILTER 10
According to the setup guides, the recommended values for a machine this size are:
INS_ACCEL_FILTER 10
INS_GYRO_FILTER 20
1 Like
Apologies, had forgot to upload it. I have uploaded it with the file name ‘where we started’.
Moreover, we took some more flights by changing some params. The file name shows the changes that we had made.
There is a video, in which oscillations in yaw axis can be observed
https://drive.google.com/drive/folders/1VUy_7I5RG20LOdYZGAS9p60SUWPE32Cj?usp=sharing
Thanks Justin for pointing this out. I don’t know how we missed such important thing. Will try a flight with the suggested params tomorrow.
Thanks again
For the altitude dip during movements of around 4m/s, can the ATC_THR_MIX parameter be responsible?
A .bin log file would really help to diagnose issues, otherwise we just have to guess
@dkemxr it’s already there in this folder. Have given a video too.
https://drive.google.com/drive/folders/1VUy_7I5RG20LOdYZGAS9p60SUWPE32Cj?usp=sharing
I would see if you can get MOT_SPIN_ARM 0.1 and MOT_SPIN_MIN 0.3 to be a bit lower, for example your hover thrust is around 0.24. But this doesnt appear to be causing an issue directly.
I would set these and retest.
ATC_THR_MIX_MAN,0.5
INS_ACCEL_FILTER,20
INS_GYRO_FILTER,20
INS_HNTCH_REF,0.198
INS_HNTCH_FREQ,40
INS_HNTCH_BW,20
You might want to try MOT_THST_EXPO,0.4 or even higher in 0.1 steps because pitch and roll do go a bit unstable as throttle rises for certain manoeuvres.
- set too high you can see instability at low throttle
- set too low you can see instability at high throttle
Thanks @xfacta for sharing your observations and suggestions. But can you please tell why INS_HNTCH_FREQ, 40? coz when I had done the notch setup as per manual… I had got peak at 78Hz and had set everything according to it.
I had set MOT_SPIN_ARM TO 0.15 and MOT_SPIN_MIN 0.2 the takeoff wasn’t smooth and had to struggle a lot to lift it. Have made MOT_SPIN_MIN 0.23 and it feels better.
I will do MOT_THST_EXPO, setting and share the logs.
Thanks
I did a small test today in windy conditions. The results were horrible and seemed like I would loose the copter. I am sharing the logs.
I request you all to please check and suggest changes, the systems is becoming harder to tame as I progress to make it worth a survey ![]()
https://drive.google.com/file/d/1i-tyn-nuty7uKb6OQcQGqJnDBa43uQen/view?usp=sharing