As suggested by @manavgandhi17, I had packed the pixhawk and had given sponge vents at the bottom (for air pressure to equalise and for the turbulence to die). I flew it at 4m/s but still saw a real dip of over a meter dip in altitude of the quad while the HUD showed no dip. Please suggest any parameters change or any other change that would help me to overcome this.
The autotune has generated some value of yaw that is messing up with controls… When left in POS Hold mode the quad starts to oscillate in diagonal axis after 8-10 secs… When given an input the behavior goes off… But when left uncommanded the thing repeats. Anyone have experienced such behavior? . And what is the best method to go about solving this.
Please feel free to suggest… I am ready to even experiment with it.
I would see if you can get MOT_SPIN_ARM 0.1 and MOT_SPIN_MIN 0.3 to be a bit lower, for example your hover thrust is around 0.24. But this doesnt appear to be causing an issue directly.
I would set these and retest.
ATC_THR_MIX_MAN,0.5
INS_ACCEL_FILTER,20
INS_GYRO_FILTER,20
INS_HNTCH_REF,0.198
INS_HNTCH_FREQ,40
INS_HNTCH_BW,20
You might want to try MOT_THST_EXPO,0.4 or even higher in 0.1 steps because pitch and roll do go a bit unstable as throttle rises for certain manoeuvres.
set too high you can see instability at low throttle
set too low you can see instability at high throttle
Thanks @xfacta for sharing your observations and suggestions. But can you please tell why INS_HNTCH_FREQ, 40? coz when I had done the notch setup as per manual… I had got peak at 78Hz and had set everything according to it.
I had set MOT_SPIN_ARM TO 0.15 and MOT_SPIN_MIN 0.2 the takeoff wasn’t smooth and had to struggle a lot to lift it. Have made MOT_SPIN_MIN 0.23 and it feels better.
I will do MOT_THST_EXPO, setting and share the logs.
Thanks
@sanjay_pandit
Although this might not solve your problems but can make a difference sometimes
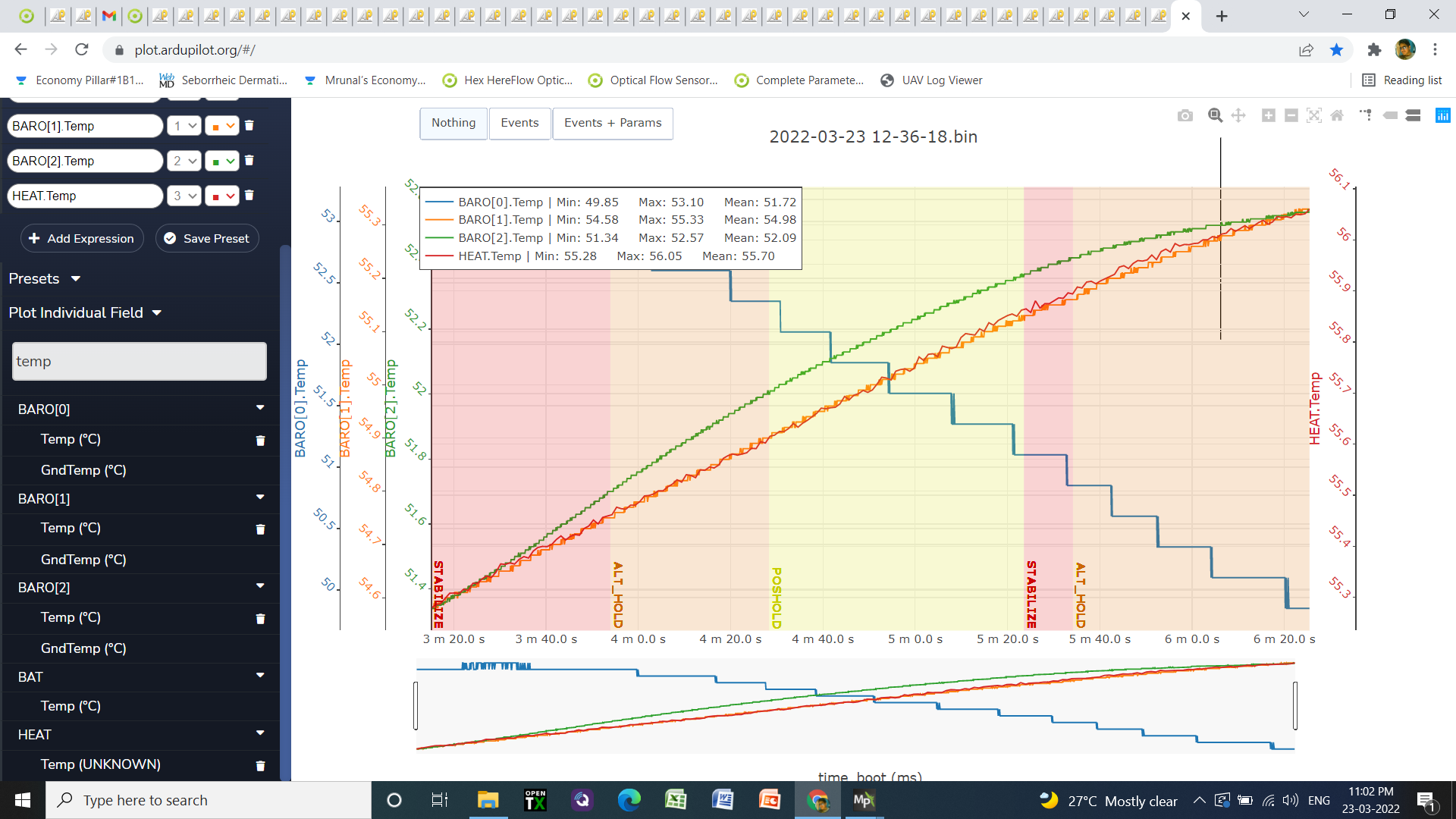
Your IMU target temperature is set to 45C
But you performed IMU calibration at 50C and from your latest log, IMU temps are around 55
@MindProbe Thanks for the observation. Was never aware of this feature until you posted it here. Will surely do this asap. But here the temperature difference that I expect during a flight won’t be considerable.
How were you able to check my current IMU temp that you checked (is it the temperature that I see under Heat.temp?)
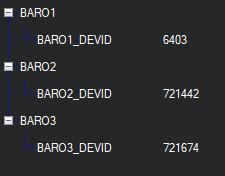
Also, can you please verify my logic that the Baro[0] is my external barometer on Here2 and rest two are from Cube? and is it the same with Acc, Gyro and Compass?
Judging from your posts, you are preparing this quad for surveying purposes which could be performed in bright sunny conditions. This can very possibly increase your IMU temperatures and introduce minor gyro drift if not compensated for
Yes. Heat.Temp is the Current IMU Temperature
It seems like BARO1 is the external compass, which should be BARO[0] in the log (not completely sure though)
Very true. Thanks for understanding my needs and suggesting the right direction to achieve it. I will certainly try it.
Thanks
I am very noob to this, can you provide some link/source (to read and understand) like you did for IMU temperature calibration. That will help me understand it better. Currently, I am not getting a single thing in this direction and all I am doing is a guess work. I would like to make it a planned on rather than a guess work.