I’ve been developing a Quadcopter and when flying, I can’t seem to switch modes in the air. I had set Stabilise, AltHold and Loiter as the flight modes, but when flicking the switch for the assigned flight mode switch it just stays in Stabilise. I’ve attached a log for it. I understand arming checks are switched off and GPS is turned off because the GPS wasn’t working on the day and I just wanted to get a bit of manual PID tuning done. Regardless, I’m pretty sure AltHold doesn’t require GPS, and even on the ground when I switch flight modes with the GPS turned on yesterday, the HUD doesn’t show any changes it is still in Stabilise. I don’t have a log for that because I was on the ground.
Yeah but even the switch from Stabilise to AltHold was not working… It was always in Stabilise and even on the main HUD it shows it is always in Stabilise even though I flicked the switch to put it into AltHode, so I’m not sure what the issue is. I just need this to be working properly before I start doing automatic flights, as I’ve got the GPS working with enough satellites now and an EKF position too, but when testing it’s the same issue - any advice?
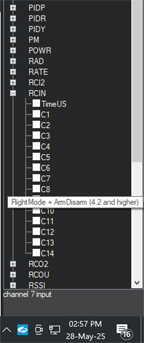
Sure. You have 2 functions configured on RC7. Flight Mode and Arm/Disarm. You also have Arm/Disarm configured on RC5 which is the default Mode channel.
Oh wow okay, I didn’t know you could configure 2 things like that on one channel? Do you know what I need to do so that it is just the flight mode selected on Channel 7? I knew it wasn’t the transmitter at fault here and I couldn’t tell what the issue was
Plus I’m using ELRS, where the arming switch is configured to Channel 5, hence I used Channel 7 as the mode switch. I wanted to ask if you know if other channels can be used to arm, but I tried swapping the channels around and it wasn’t arming anymore. I can have another go in case I did anything wrong but I’m really unsure
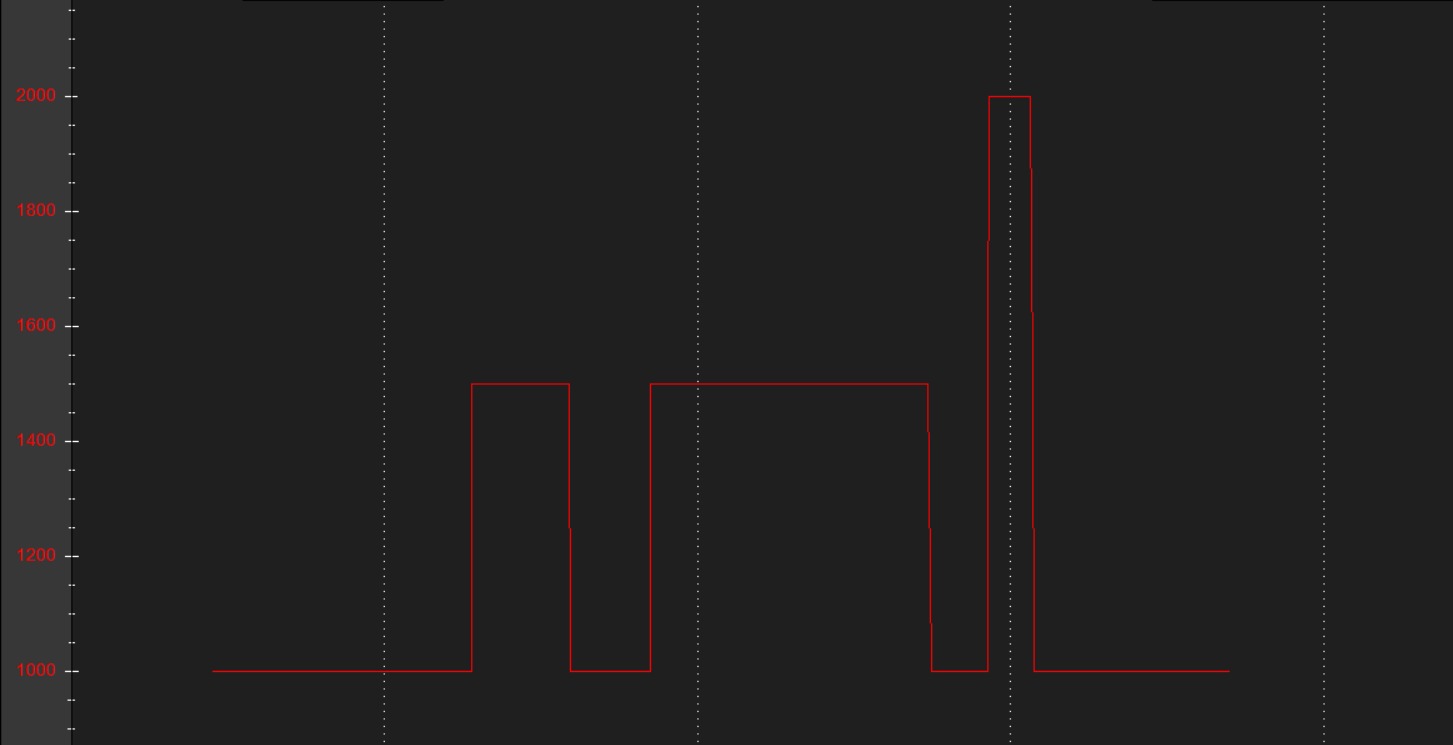
BTW-The dead giveaway here can be found in the log RCIN field. Mouse over the channels and what’s configured will pop up. You can see the problem here: