Michael Oborne has recently improved the Mission Planner’s Swarming feature so we tested it out at the recent developer “un-conference” in Canberra Australia.
First we tried one drone following another:
Then a pair of drones following (or sometimes leading) a rover:
If you want to try it yourself, here’s how:
connect to each drone individually and set it’s SYSID_THISMAV to a unique value (i.e. “1” for the first drone, “2” for the second, etc)
connect to all drones at once by plugging in the appropriate telemetry radio for each drone into the PC.
right-mouse-button-click on the MP’s menu bar and select “Connection Options”. If you have multiple radios connected they should each appear in the drop-down. Select each and press Connect. During our tests we used 1x3DR radio, 1xRFD900 radio and finally wifi for the Solo.
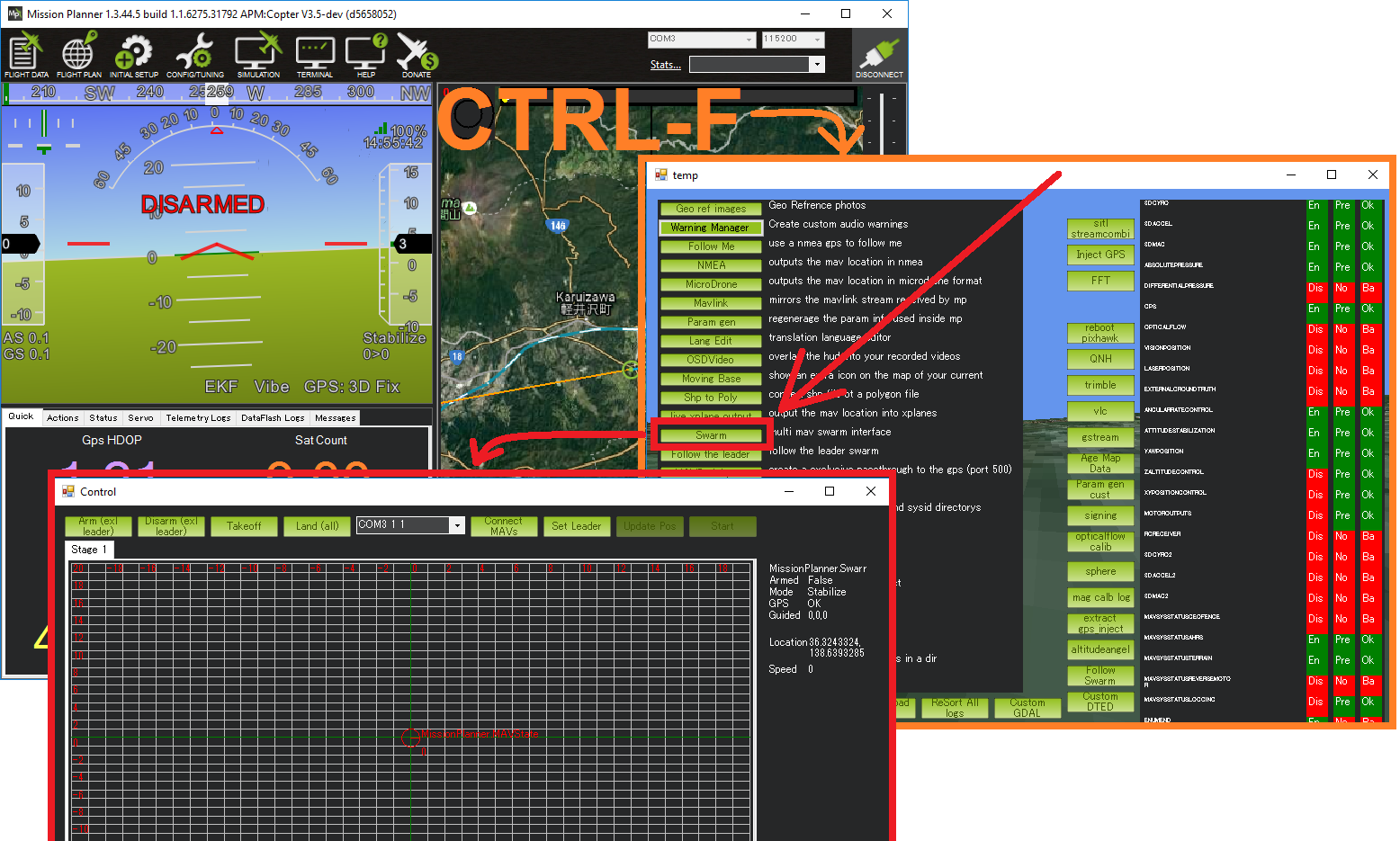
from the Mission Planner’s flight data screen press Ctrl-F to display the hidden controls window. Find and click the Swarm button.
from the Swarm Control screen use the drop-down in the middle to select the lead vehicle and press “Set Leader”
place the vehicles on the ground in roughly the initial positions you’d like them to be in during flight, press the “Update Pos” button.
get all the followers in the air first by pushing the “Arm (exl leader)” button, then “TakeOff” (it will climb to 5m).
manually arm and take-off with the leader using the regular transmitter. Get the leader at roughly the same height as the followers (i.e. 5m).
click Start to start all the followers following the leader
if the followers act strangely push the stop button to stop them from trying to follow, use the “Land (all)” button to bring them down.
This swarming makes use of ArduPilot’s velocity controller which have been included in Copter since version 3.3 meaning that it works with the Solo.
Warning: this is beta software and although you may not need to use a transmitter to control the followers, it’s best to have a regular transmitter/receiver attached and the flight mode switch setup for use in Loiter and/or AltHold so if anything happens, worst case, the pilot can grab the transmitter and change the flight mode and take control manually.
Michael,
What are the units of the numbers displayed in the swarm screen for x,y and also for vertical? I attmpted a test flight today and had the follower vertical offset set to -10 below the primary and when I started the swarm, the follower shot up to about 1000 feet while the primary was at 400 ft.
Hello ,Mr.rmackay9,I rencently research on mutihelicopter swarming,and my MissionPlanner version is 1.3.59 .I follow you step,and open dialog of swarming ,but I find some trouble .In my dialog ,the Stage1 page is black! I try 1.3.60,but there is no difference.I don’t know how to make it work right.
place the vehicles on the ground in roughly the initial positions you’d like them to be in during flight, press the “Update Pos” button.
Can a drone follow a rover?
If so, from above, it seems that the altitude offset from drone to rover can be set, for example, placing the drone 1m or so above the rover and then press the “Update Pos” button. Will this work?
On MP with Control+F there are two buttons: “Swarm” and “Follow the leader”. With “Swarm” button appears button “Guided Mode”. What is it for?
Thanks for this topic. I have a question from it.
How many telemetry do we need on GCS؟ Is a telemetry enough for all of copters or rovers? or we should use 1 telemetry for each copter on GCS?
Tank you for response me.
I am also interested in using this feature on fixed wings, I need 4 fixed wings to follow the main aircraft, of course they have altitude difference when tracking
I’m not the Plane expert but I don’t think that Plane is supported. My understanding is that Boeing implement swarming of jets using AP but I don’t have details.
Hello sir,
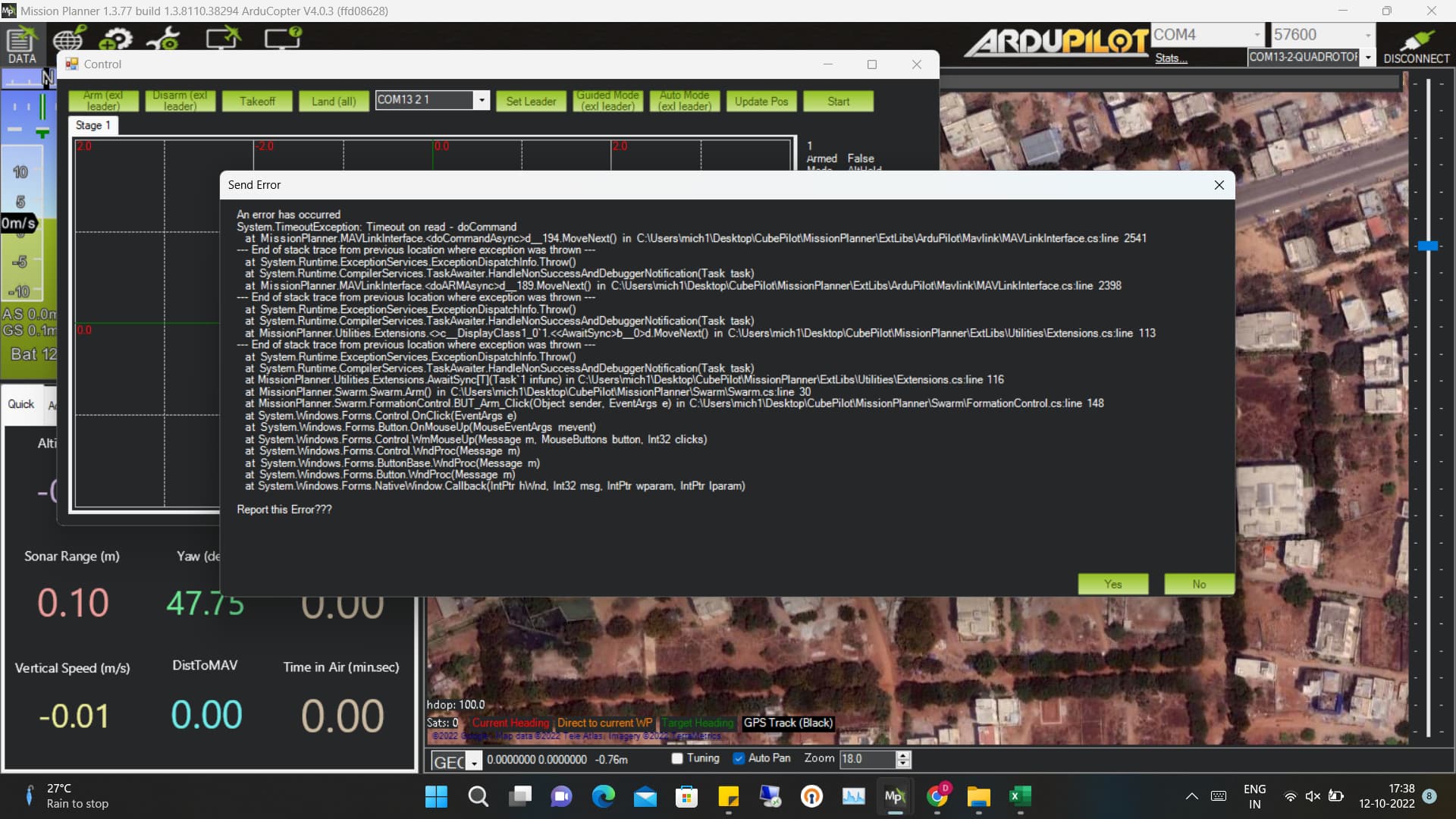
I am happy that you have done the swarming. I have also been trying to do the using 2 drones and I also followed the same steps which you have mentioned. But the thing is I am facing some issues which are
shown in the below-attached image. And also sometimes the system gets stuck when I gave the command to Arm (exl Leader) or sometimes the Takeoff command is given to the drone.
I even tried to upgrade the firmware and also tries multiple versions of the mission planner but the same error is showing.
I am requesting your help to resolve this issue, or if possible then can you provide me with some references or any kind of possible help?
You can drop me a mail at kdevanand517@gamil.com or if you are free and whenever possible then we can connect and try to resolve this issue. Or I can request you to drop your mail id so that I can connect and discuss this further.
Your help and response are valuable to me.