I had a weird experience with plane yesterday. Took off for what was supposed to be a short up and round and land mission but immediately ran into a weird series of errors I really don’t know what to make of and had to manually land it: - kept triggering some failsafe (literally kept saying “failsafe”) and so couldn’t do it’s mission (kept entering RTL). Other messages:
“No GCS heartbeat” (but was claimed ~98% telem link strength)
“Unable to start landing sequence”
“Failsafe long action” is enabled"
Also had a surprising number of complaints about GPS coming and going (after having great signal on the ground and RTK fix).
GPS oddness is making me think maybe it could be the telem link (and therefore RTK inject) browning out maybe!?!
Setup is plane 3.8.4, PH2, Here+, it’s a fixed wing, RDF900 with the stubby dipoles on plane at the longer dipole antennas on the ground just connected to my unpowered laptop.
I had a weird experience with plane yesterday. Took off for what was supposed to be a short up and round and land mission but immediately ran into a weird
series of errors I really don’t know what to make of and had to manually land it: - kept triggering some failsafe (literally kept saying “failsafe”) and
so couldn’t do it’s mission (kept entering RTL). Other messages:
dronekit-la points out you’re having significant problems with your GPS.
The EKF is losing track of where you are.
“No GCS heartbeat” (but was claimed ~98% telem link strength)
I’m not sure where the signal strength you’re refering to is coming from.
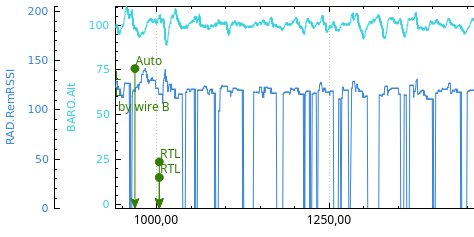
But if you graph RAD.RSSI RAD.RemRSSI you can see things aren’t healthy as
soon as the motor starts spinning! The dropouts are also in the “not
healthy” category - and they correspond to your GCS Failsafe messages.
“Unable to start landing sequence”
You don’t have a DO_LAND_START in your mission, so starting an automatic
landing sequence isn’t possible. automatic landing sequences are awesome
you should have one, even if you don’t use it ordinarily. Using the new
two-stage failsafes you can have your vehicle circle for minutes then
land itself.
“Failsafe long action” is enabled"
Also had a surprising number of complaints about GPS coming and going (after having great signal on the ground and RTK fix).
This is borne out in the logs. Try graphing GPS.Status
GPS oddness is making me think maybe it could be the telem link (and therefore RTK inject) browning out maybe!?!
Either electrical problems on the aircraft or interference from something
are more likely IMO, given you’re having problems with both GPS and
telemetry radio.
Setup is plane 3.8.4, PH2, Here+, it’s a fixed wing, RDF900 with the
stubby dipoles on plane at the longer dipole antennas on the ground just
connected to my unpowered laptop.
TELEM signal strength being ~98% was from memory - MP was showing strong connection the entire flight - this parameter isn’t recorded in the data flash logs, the RSSI you’re looking at is for the hand held 2.4GHz radio. It does drop but that corresponds with takeoff which makes sense)
But this is the confusing bit cause I think we both concluded GPS problems were due to TELEM failing (presumably due to power issues) but (a) it should have just fallen back to onboard GPS and (b) I’ve flown with RDFs on my unpowered laptop plenty so what’s different this time:?
The question is why was it trying to trigger a auto land sequence - I’d manually setup a decent and land path in the mission (waypoint file here)
But thanks for the tip - auto land looks great! Although it wouldn’t have helped here cause it just kept returning to RTL mode instead of doing any form of mission
TELEM signal strength being ~98% was from memory - MP was showing strong
connection the entire flight - this parameter isn¢t recorded in the data
flash logs, the RSSI you¢re looking at is for the hand held 2.4GHz radio. It
does drop but that corresponds with takeoff which makes sense)
No, RAD.RSSI and RAD.RemRSSI are the for the telemetry radios. It says so
right here:
But this is the confusing bit cause I think we both concluded GPS problems
were due to TELEM failing (presumably due to power issues) but (a) it should
have just fallen back to onboard GPS and (b) I¢ve flown with RDFs on my
unpowered laptop plenty so what¢s different this time:?
GPS and telemetry are very much separate things here. I did not conclude
the GPS problems were due to telem failing - I just noted that them
failing at the same time may indicate power or interference issues.
Unless you’re doing something very funky, there is only “onboard GPS” The powering of your laptop is neither here nor there.
The question is why was it trying to trigger a auto land sequence - I¢d
manually setup a decent and land path in the mission (waypoint file here)
Your FS_GCS_ENABL parameter is set to 1 - so if it loses contact with the
GCS it will attempt to RTL.
If you were flying a multicopter that mission might work. But for a plane
you need to set up a DO_LAND_START.
But thanks for the tip - auto land looks great! Although it wouldn¢t have
helped here cause it just kept returning to RTL mode instead of doing any
form of mission
As that link explains, if the plane RTLs and can find a DO_LAND_START it
will jump to that item. Could get hairy with a patchy GPS!
I’m afraid it was not so .
As peterbaker wrote your plane loose several times the connection with the ground station and the relative failsafe was engage.
What you probably saw on your ground station was a freeze telemetry screen
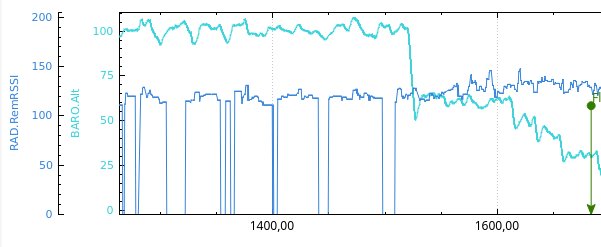
If you look at RAD.RemRSSI it went to zero several times
This happened upon two conditions , the position of the plane and the altitude, as soon as it went from 100 meters to 60 meters , your telemetry radio did not loose anymore the connection.
Thanks very much again for replies, sorry for delay
I’m still puzzled.
I did a test flight without the RTK system and aside from flying pretty wide of way points it did basically track the mission and I had none of the above errors. On landing I setup for a repeat and plugged in the RTK system and before I even took off had all the same issues.
So…what could I be doing wrong with RTK system??? (I’ve used RTK with quads fine before albeit not this exact unit)
And what fail safe have I got set wrong that it’s not falling back to just using its onboard GPS when telem/RTK messages are bad?