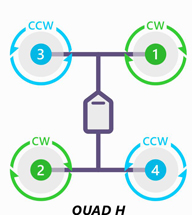
hello everyone building a quadcopter h-frame. I require some suggestions about maneuverability in pitch which I want to increase please help out of this also should i place flight controller in the middle of the plates?
here i attached the image of the frame and a flight video
its not x frame as motor distance of roll and pitch axis is not same. moreover i want to increase distance in pitch axis and increase some maneuverability pitch while making roll axis mechanically stable what should i do
Neither are many X-frames. I have built all manner of quad geometries and X-Frame is the typical choice. In practical terms it won’t make much difference but you are saying that frame looks like this?
that finally i will do but it is too stable in both axis i want slightly less stable in pitch to maneuver easily so please give me mechanical side suggestion that i should change to perform above task