I’m working on tuning my 5" quadcopter and am following the steps.
I was on the step " Test AltHold" - I realize now I had PosHold set but I don’t think that should matter(?)
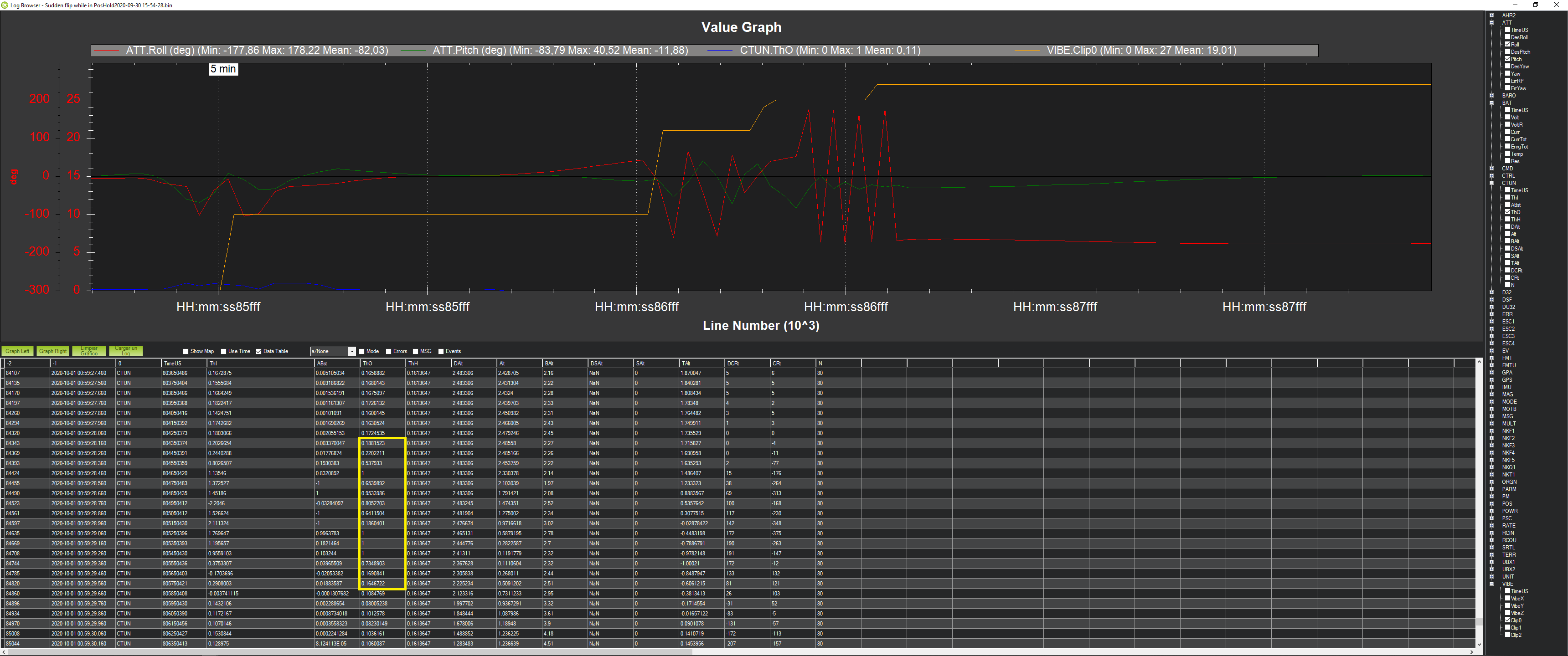
It was holding beautifully at about 6 feet and I was just slowly moving it in each direction a bit so I could double check my vibration levels.Things were going great for about 3 minutes when it suddenly flipped, drove itself into the ground, then righted itself and started rapidly rising. I quickly disarmed and it only fell about 15 feet and didn’t damage anything but I’m really alarmed that it happened.
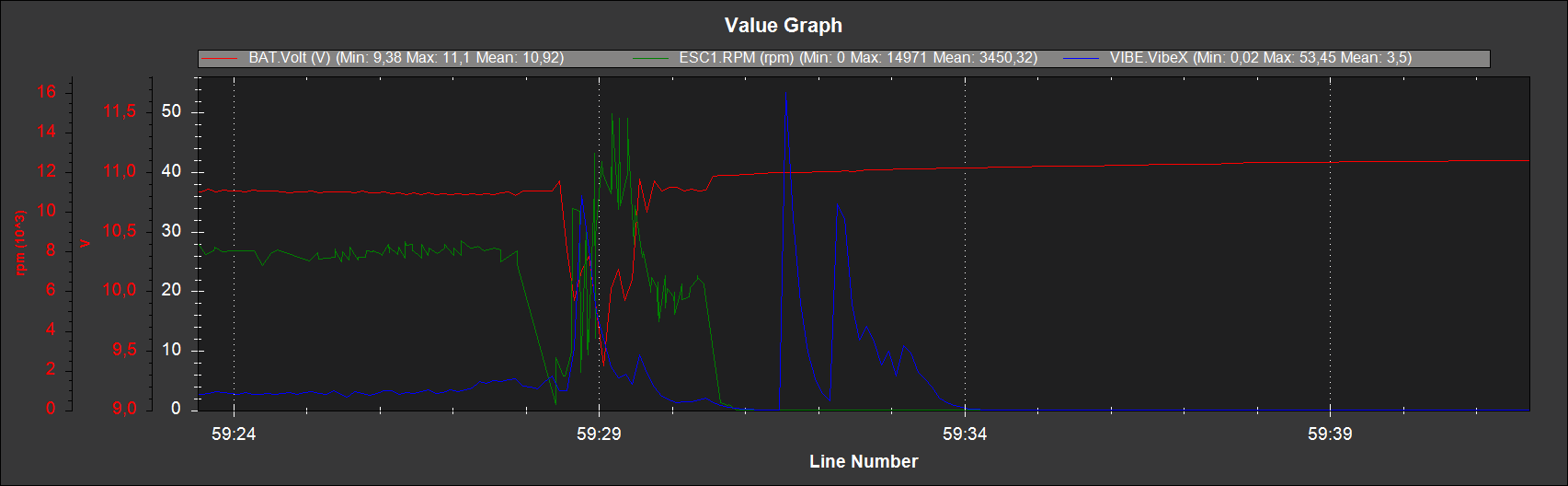
Hello! About what I see in the log, I think you had a desync problem, a battery problem or another type of hardware problem because the RPM of your motors came down suddenly and the voltage of your battery dropped from 10.9v to 9.3v. and your vibrations levels rised up.
WOW.
That is the same setup I’m using and I am also using DShot150.
I’ll disable logging and see what happens.
I actually have a video of the crash. I could have sworn it actually hit the ground and then shot up but it may not have, it might have just recovered and shot up.
All I was doing was gently going straight up and back to check the vibrations. I’ve got a 1 block square park nearby that I use when I’m attempting any actual tuning.
It is not necessary to turn off logging, don’t kill the copter!
There is an error in the code, it has already been found. It remains to wait for this fix to be included in the next release.
AFAIK, only in other threads mentioning this bug. I haven’t found some kind of cumulative changelog for the master version either, but that’s no surprise considering these releases are not really meant for public use.
If you’re using the Tekko32 as mentioned in the motor glitch thread, this may be more than an Ardupilot issue. Your Tekko32 may have defective hardware causing desyncs, and there’s a recall out for them.
@wsmeyer that’s the one. I would contact whoever you bought it from about getting it exchanged for the new, fixed version. If you’re impatient you could grab another ESC and do another test flight to see if that was the issue right there.