Hi @AndreyI @cglusky Thank you very much
this is firmware for kakute f7 https://drive.google.com/file/d/1f1h_Zl4VqvFQ5cYJRpsZz4gYWBZ6pCbX/view?usp=sharing
Please feel free to ask if you need anything.
Thank you, I will test it soon.
1 Like
On firmware 4.0.4 RC4, the engines sometimes seem to shut down. The copter when it twitches. Sometimes strongly, sometimes almost imperceptibly. If you select the oneshot Protocol, the copter flies smoothly.
With this fix, there are no jerks, the motors are running smoothly. But I haven’t flown with this firmware yet, I only checked it in my hands. In this fix, telemetry data from ESC 1 is not recorded correctly. How safe is it to fly on the “dev” firmware?
4.0.4-RC4 is not dev firmware, it is a tentative release candidate that will most probable be declared stable (without any changes whatsoever) on this weekend.
Dev firmware is 4.1-dev (a.k.a. git master branch) and that one is a hole other animal.
Now the battery flew off, everything went perfectly.
I hope responsible people will include this fix in the next update…
Fixed firmware (link above), compiled from 4.1-dev.
On firmware 4.0.4 RC4, motors with the dshot Protocol are buggy.
1 Like
I casually asked in the github thread if this same issue could maybe be affecting the Omnibus nano FC as well. And, I think it is. I was getting a big motor twitch on every flight… Around the same time every flight.
I disabled logging and have been flying all weekend (maybe 10 flights) and it has not twitched at all.
Be good to try the same fix. Anecdotally the lack of DMA on UART1 this causes may be increasing CPU load as I now see logging failures with FFT enabled, so it would be nice if we had a proper fix - but anything is better than copters falling out of the sky!
Ok so seems like I am having same issue on Kakute F4 V2 AIO and Tekko32 ESC.
It’s always on same arm, so I swapped ESCs around thinking it’s wiring, but it followed ESC.
So I got new ESC TEKKO32 metal. and it still does it.
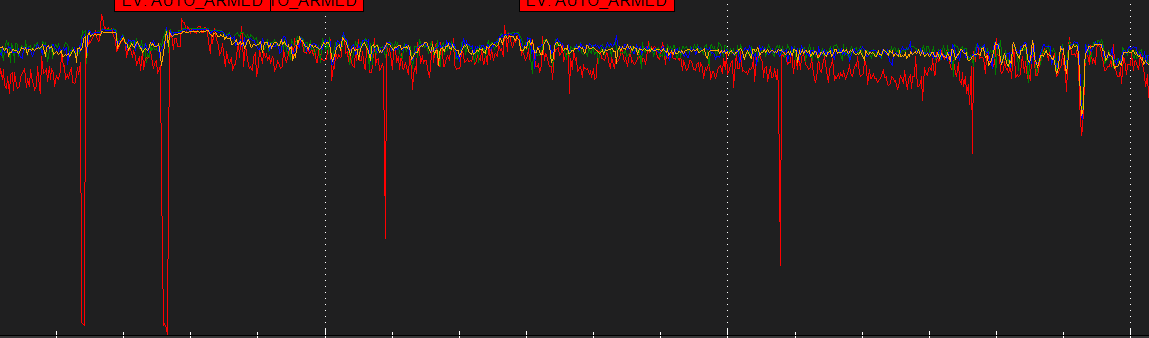
I can see on ESC telemetry large voltage drops
I do have gps/compass on 5V but I can’t see why that was an issue, also why there is no drop on any other ESC, but that only one.
Also power is shared across all ESCs so it should be at least random ?
I really ran out of ideas
what motor/servo settings have you got, and what blheli settings? I’m just wondering, you wouldn’t think something common would affect only one ESC.
so BLHeli settings are
for all of them.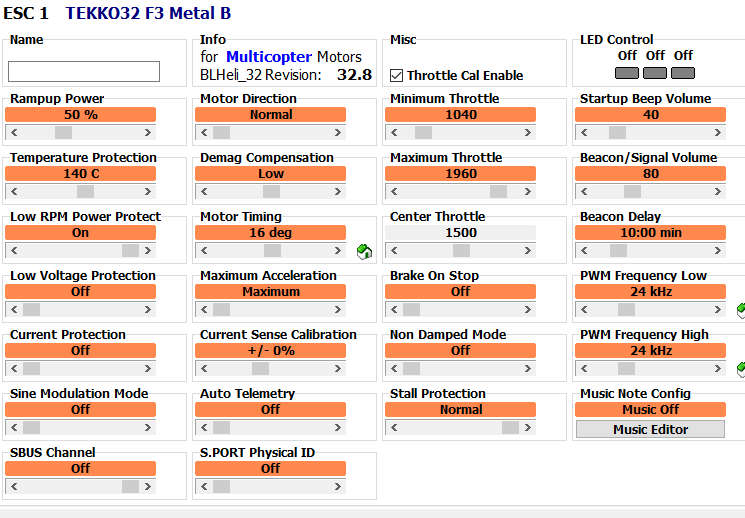
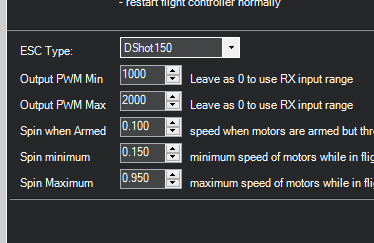
And Motor settings are
Yeah at this point I really don’t know what could be an issue, I eliminated all variables, but looks like on some point it was coincidence rather than elimination.
Try dshot600 - I would say any timing issues are lowest when using that rate
Maybe not a solution, but just things I found in my situation:
I would try DShot300 with the tekko32 65A metal - It seemed to have trouble with DS150. The smaller tekko32 45A 4in1 had no trouble at all on DShot 150 for some unknown reason.
Also in BLHELI settings, turn OFF Low RPM Power Protect. So far I haven’t found a reason to change Motor Timing from default either, but then I only use bigger props too…
I also use Sine Modulation ON and PWM Frequencies at default (maximum I think)
Motor timing will be motor dependent - some tell you what this should be in the specs. I was getting de-syncs on some cobras and changing to the specced value cured this.
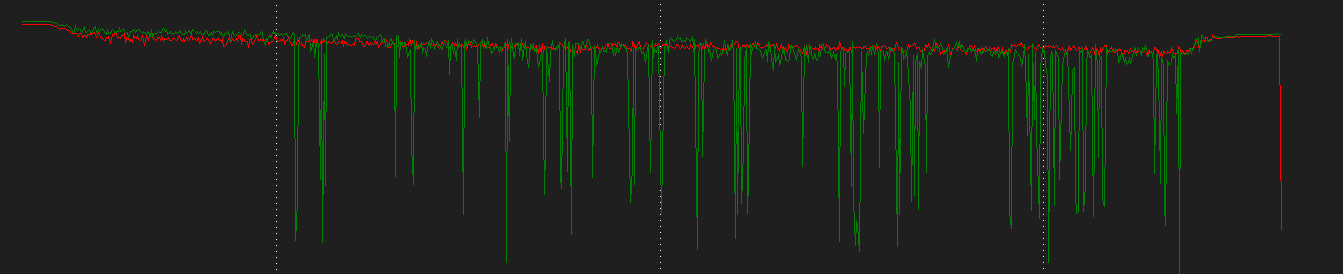
Thank you both, I will try those settings, or play with it and see if it changes at all. to be fair it;s not only that twitches, whole graph looks weird on voltage
for that on ESC ( which is now changed to new one and does the same)
This one was before changing ESC
I’ve tried to find anything about it for my motors but I can’t see any specs for that. my motors are sunnysky X2212-12 980KV
Yes no doubt.
There’s so much bad and conflicting info out there about some of the BLHELI settings that it can be hard to know what to change for big props/small props, desync issues…
I’ve tried to stick with defaults as much as possible and just change what I needed to for bigger props, 4S/910kv/12 inch for one combo, and 6S/390kv/13inch for another combo. Same BLHELI settings on both and no issues so far.
And I figure the sine wave feature sounds like it’s built for bigger props/slower motors.
Is it a bad wire somewhere? a break in the middle that you cant see?
Well initially I had 10" props with 600KV motors, but that was happening so I though I will change motors to 980Kv wit 10" props, but nothing changed.
It’s not bad wire, as I did swap ESC around only and left wiring in place, and it followed ESC. So I though it’s bad ESC. but no I got brand new ESC, and it’s still happening that’s why I am super confused
Btw, should I calibrate ESC with option in mission planner ? or that doesn’t matter yet ?
It doesn’t matter at all with Dshot. I’ll be interested to see if it’s still there with Dshot600. All kinds of chatter these days about timing.
1 Like