Well, after my previous troubles, I bought new batteries (5200 mAh), and the drone flew fine with them; I did about three or four flight of 10-11 minutes.
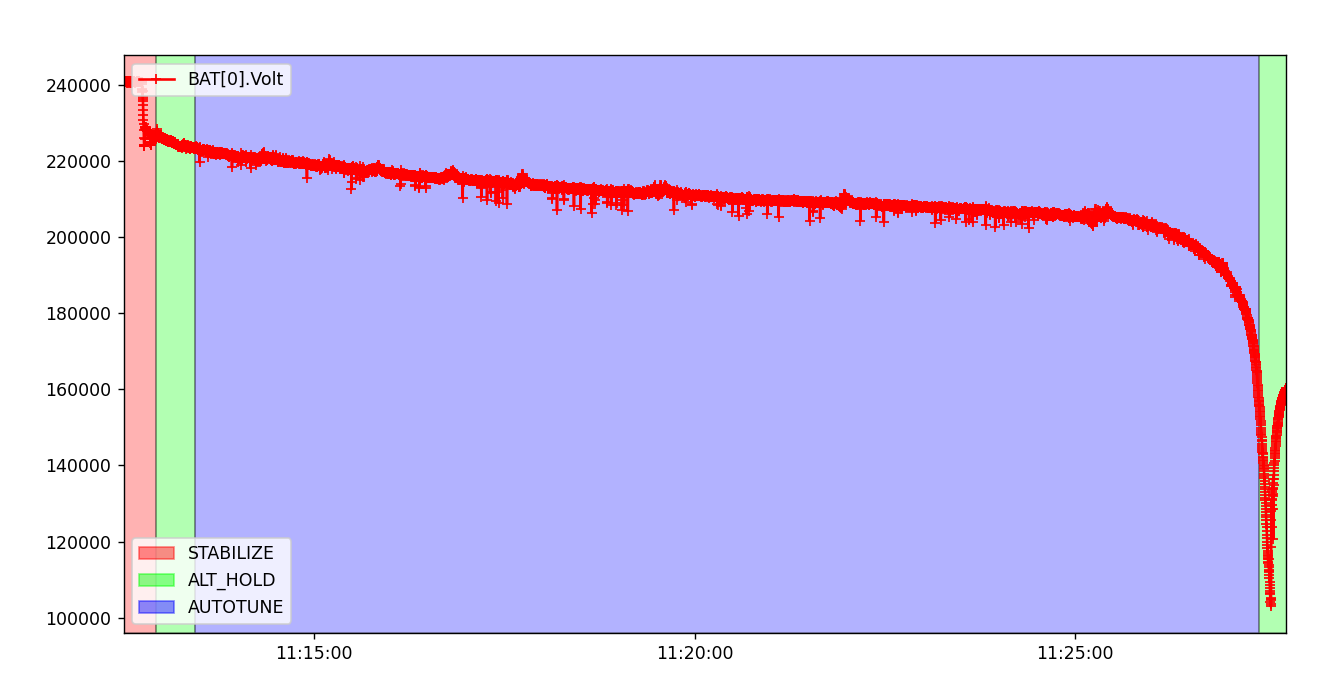
Today, the perfect day for autotune, after about 14 minutes and 50 seconds in flight (most part in autotune), the drone very suddenly fell out of the sky.
The battery monitor is set up, and should either land or RTL when the battery is low, but appartenly it didn’t, so either the battery monitor is not working or there is something else wrong. The drone did this with my old batteries also, but much sooner in flight (after about 7 minutes), and these batteries had only 2200mAh, so I still suspect a connection.
Something is strange with your battery voltage in the log. It’s off by a factor of about 1000. This might be why the low voltage protection didn’t kick in.
Furthermore, this craft was in no condition to run Auto Tune. Almost immediately it was producing failure to level error messages. PID’s at default and the notch filter is misconfigured.
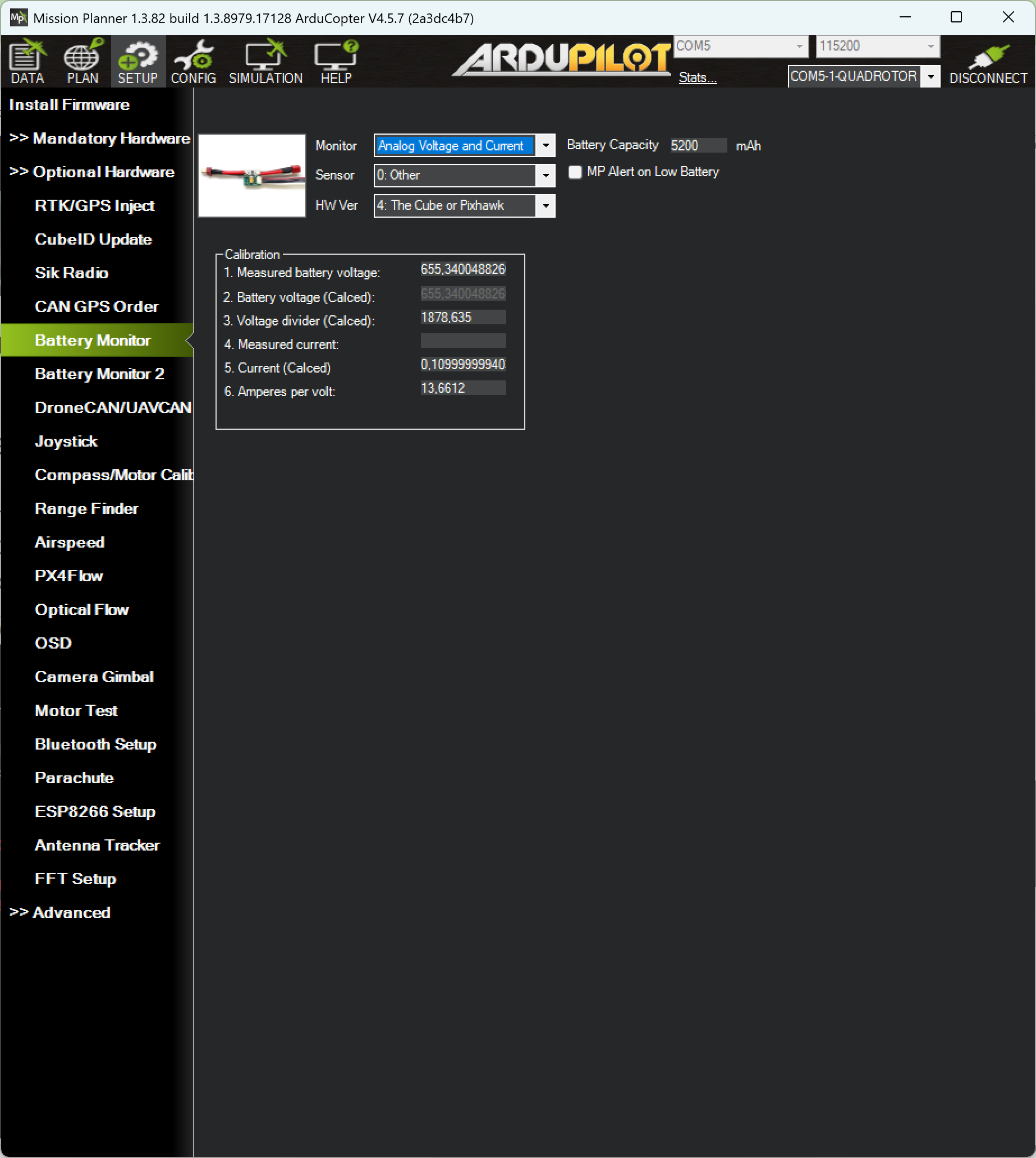
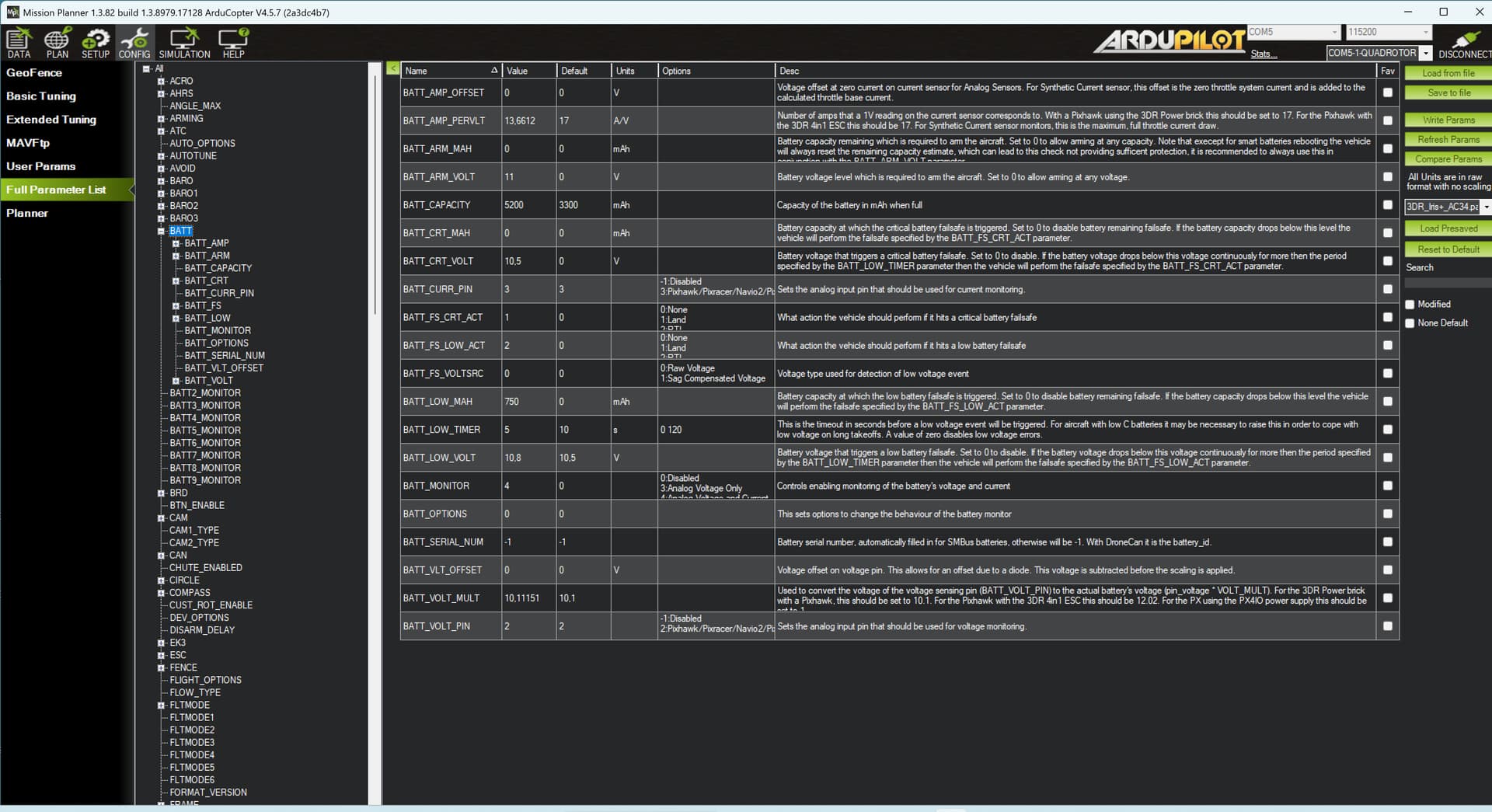
You guys are right about the value BATT_VOLT_MULT parameter, but I did not touch that parameter ! In the docs it says clearly: " Note: This parameter is for advanced users", and hence, I didn’t touch it (I hardly understand what it does and I’m far from an advanced user ) !
It that value dependend or automatically filled in somewhere (default is 10.1 in my parameter list) ? Allister suggest 19.9 as a better start. Should I set it to 10.1 or 19.9 ? I also see other values in the description, so to avoid misunderstandings, this is the Pixhawk I’m using:
It worries me that there’s a wrong value in there, while I’m 110% sure I didn’t go near that parameter … Anyway, I’m glad you guys found something really wrong, so I can rectify it.
Now that I’ve read that procedure, I remember doing it without knowing it worked on that parameter, and I remember getting some “strange” values … That’s probably the cause.
Every time when I enter 12,24V, and press Tab, the voltage divider changes (also the Battery Voltage “Calced”, but when I press Tab several times, I get an error message “Invalid number entered”. I can then only press “OK” and all “seems” ok.
But when I return to the same screen later, the value has changed again (after disconnecting and reconnecting to MP:
Enter the battery voltage from your multimeter to the Measured Battery Voltage. Tab once. Then change to the “data” screen. check that the battery voltage is correct there.
Also, a 3S lipo battery should be 12.6v when fully charged. 4.2v/cell.
It’s a new battery, only used once or twice. I just now topped it up.
With my lipo-checker, the individual cells give me 4.12V - 4.13V - 4.11V.
My multimeter gives me 12.27V.
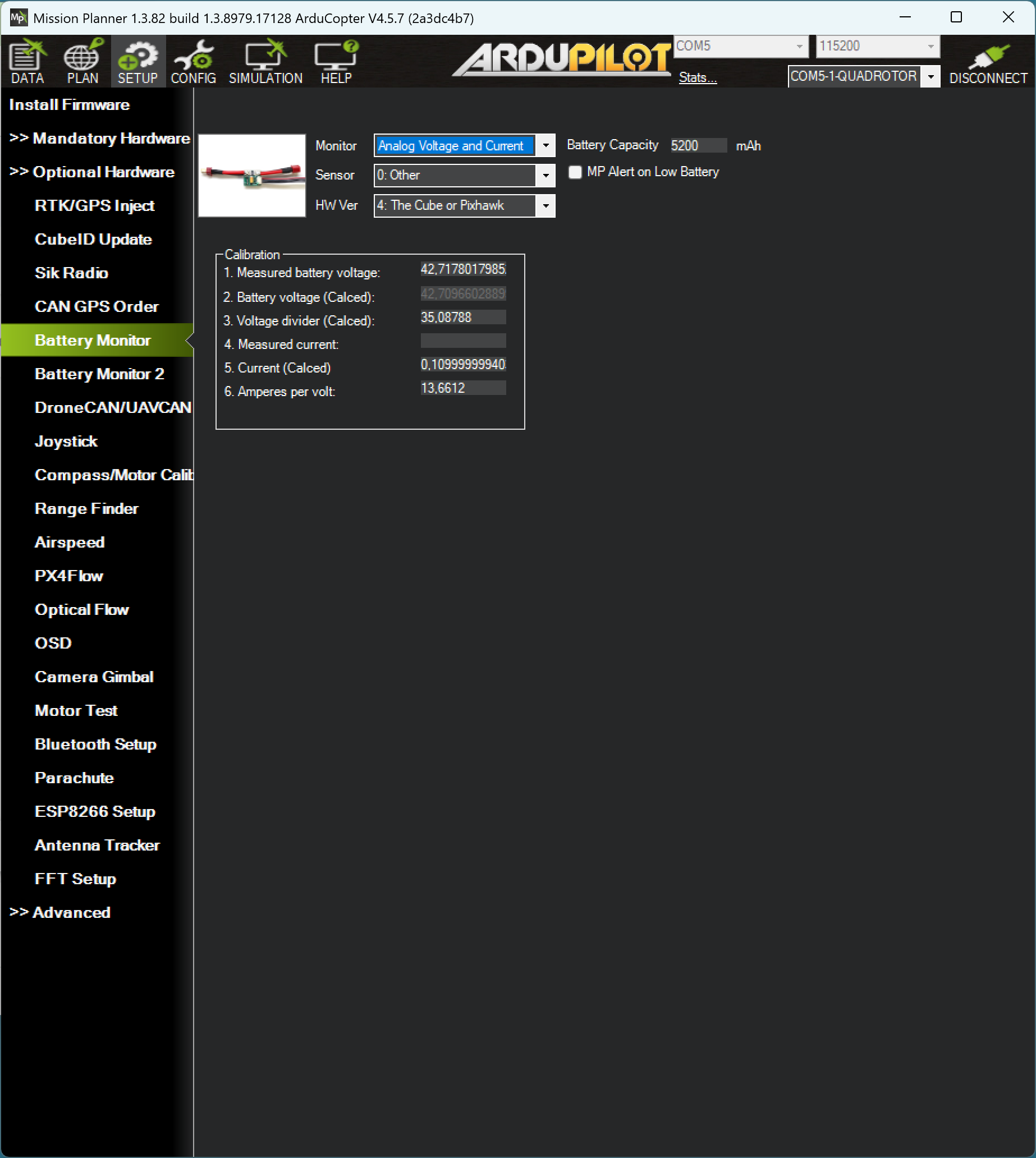
I did as you said, and now the data screen gives me “normal” values (about 12.6V). I don’t understand how that’s possible while the battery is not connected to the drone, but only to my PC through USB. Is that a simulation of the voltage it will expect with battery connected ?
You obviously need the battery connected when you enter the measured voltage - for the correct multiplier to be calculated.
Since you did it without a battery connected Ardupilot is scaling up the floating voltage (something near zero volts) appearing on it’s analog input - you are back where you started with a ridiculous multiplier.
You can do that calibration while the battery is depleted - that’s better actually since low voltages are what matter most.
You could even use a 2S battery or a 10v power supply, provided you do it accurately.
Ok, thx ! I just did it with my depleted battery, and I get a “normal” value on the data screen.
So this is not really depend on the individual battery (I have several) ?
I also noticed now that I have to enter a comma, not a dot (so e.g. 12,4 not 12.4; I tried both ways several times). That’s strange to me, as I suppose mission planner and the whole thing is not “continental” ?
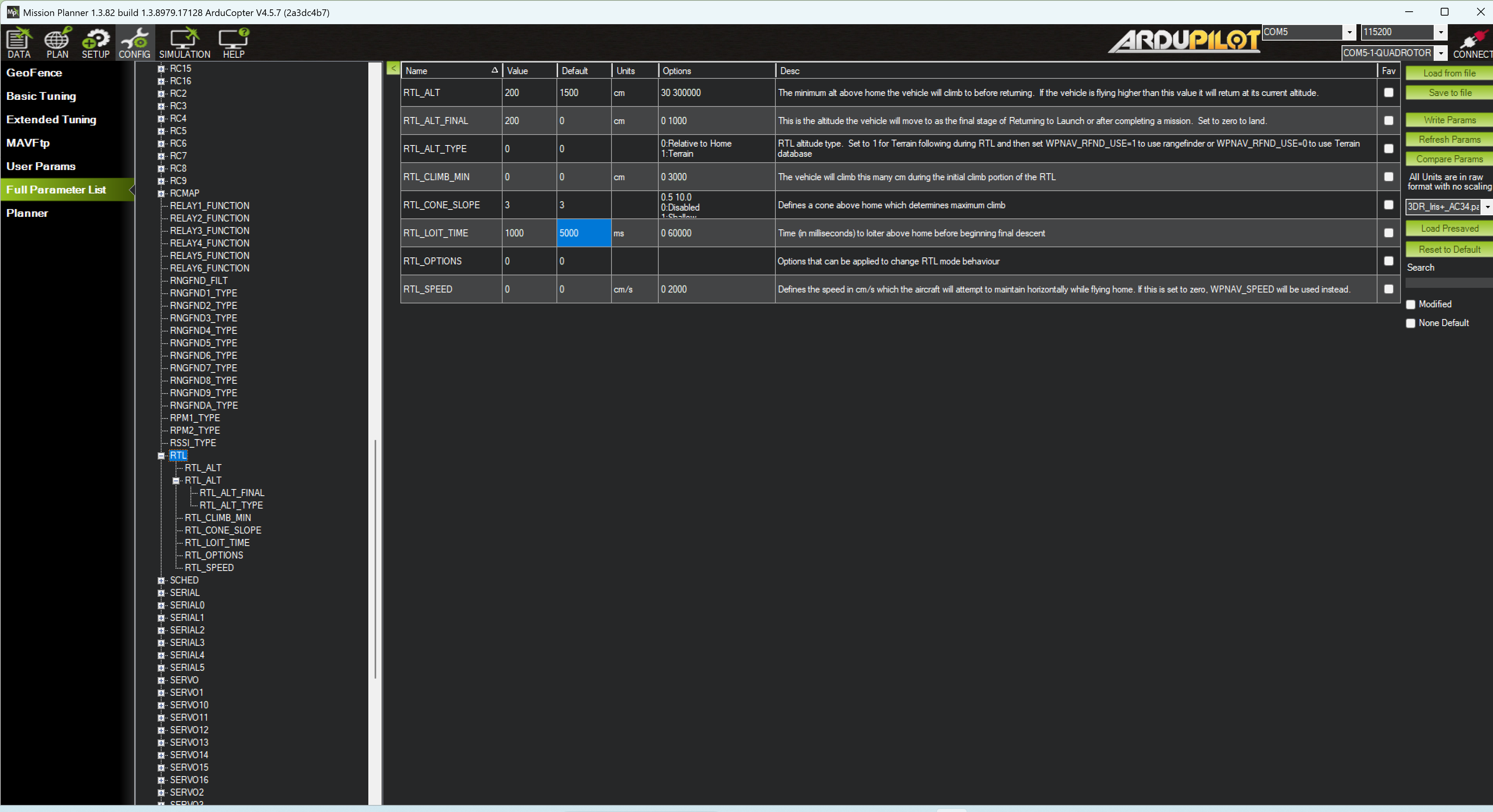
I can still use A, E en Y, but throttle does not respond anymore: it stays at about 2 meters (the RTL height).
I steered it to another place, a bit farther from me, and after about two minutes, it lands. I suspect this is the CRT-procedure kicking in.
I measured the battery voltage about 1 minute after that (entering the house), and it read 11.11V, so still some to spare ..
Any idea what is wrong ? It’s already a lot better then crashing each time after completely depleting the battery, but still not as it should.
How about stopping trial and error procedures and do it just once the correct way?
There is a step-by-step process that achieves that and requires no prior ArduPilot knowledge. It does however require you to read and follow instructions. There are no free meals.
Try ArduPilot methodic configurator software for a change.