Hello, all. I was hoping somebody can shed some light on why my heavy-lift platform fell out of the sky during an auto mission. Here are the particulars. The drone is a large (1600mm) hexacopter with U8II 85kv motors running on 12S. It usually flies great in all modes especially stabilize. This was the first test of auto mode using UGCS for the mission control. If you look at the logs you will see two flights in the same log. The first one is just flying around in stabilize mode a few minutes, then on the ground for a bit and then the start of the auto mission. During the second flight line of the mission (heading south, flying at around 20m AGL) the drone suddenly yaws (maybe 1 full rotation if I remember correctly) and descends. I managed to switch to POS Hold and apply full throttle to arrest the descent just before it hit very hard on the landing gear (breaking the gear) and bounced maybe about 5 feet before landing again very hard. I can not see any reason for this from inspection of the hardware as well as the flight logs. Any ideas from this log? Thanks very much.
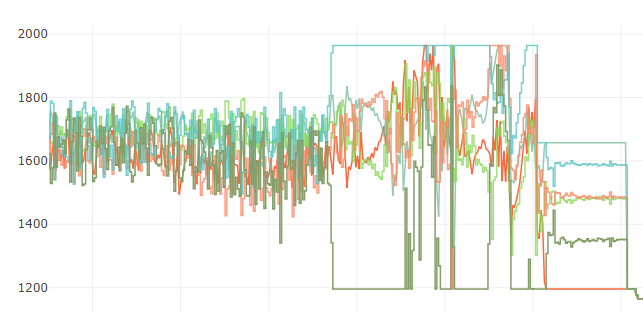
Looks like it was humming along nicely before motor 2 gets commanded to maximum probably because of a loss of thrust = dead motor or ESC, thrown a prop (but vibes are still low)
Motor 1 gets commanded to minimum to try and balance out the loss of thrust in motor 2.
The other motors all increase their output slightly to try and maintain altitude.
Roll and Desired Roll depart the most - this matches the Hexa X configuration where motors 1 and 2 are opposite each other and at the 90 degree and 270 degree positions.
What ESC and props do you use?
It could be a desync issue.
Yes, I agree with @xfacta’s analysis (nicely done!). It quite clearly shows all the signs of a motor, prop or ESC failure of motor 2 (left motor).
In case it helps, Copter-3.7 will have some improved handling of motor failures on Hexacoptes (and octacopters and dodeca-hexa copters) because it will prioritise altitude over yaw control. So the vehicle would probably still lose some heading control but might maintain altitude or at least land more softly.
I am using T-Motor Alpha 60 HV ESC’s and the props are Supreme 2880 carbon fiber.
Now that you mention the sync issue, there have been 1 or 2 instances when starting the propellers that one motor will fail to initiate rotation and just jumps around haphazardly. Usually a simple disarm and rearm fixed the problem but perhaps the issue was a sync issue.
Other than re-calibrating the ESCs is there something else I can do to solve the issue? Should I raise the Mot_Spin_Min higher?
When arming and getting a prop rocking rather than rotating it can be a case of just not enough energy to get the prop moving. All non-censored brushless motors start up this way and until the prop rotates there is no real way for the ESC to detect the motor.
Try increasing min and armed values for the motors until you get a consistent low spin when armed.
I did what might be called a deliberate de-sync a week or so ago with a small 450 size quad.
Luckily the frame is indestructible.
My mot-spin values were too low, but I didn’t worry about it as it was easy to punch off the ground.
HOWEVER, I was mucking around do free falls, from varying altitudes.
The low altitude was not a problem, but from higher the props had time to stop.
A quick punch near the ground and not all started up. You can imagine the rest.
We are building a large Hexa at the moment using T-Motor Alpha HV ESC’s and by all reports they are a very good ESC.
What motor do you have them attached to?
As a side note, there are an increasing number of ESCs that provide feedback including D-Shot telemetry, KDE CAN ESCs, ToshibaCAN ESCs, etc. In future versions of Copter we will make use of this feedback to add safety. One idea is to add a pre-takeoff check (that runs after arming but before takeoff) that will ensure all motors are spinning properly. In flight motor failure handling (for hexa, octa, dodecahexa) will also hopefully make use of the feedback.
@autopiloton The Alpha ESCs have a (not cheap) programming interface that lets you reflash the ESC for your particular Tiger motor. It may, or may not, solve your desync issue, but it’s an option I’d take into account.
I HAVE GOT SIMILAR PROBLEM, HI I AM A BEGINNER I NEED TO LEARN HOW TO CONTROL MY DRONE MANUAL I DON’T WONT TO GUESS THE SWITCH, I CONTROLLED MANUAL IT LAND SAFELY, NOW I WANT TO BE PERFECT ON MANUAL AND AUTO MODE,
i calibrated the radio controller, now i get the function of switch C, G, E, AND throttle, yaw/ roll switch .
My flight mode are as flows of Futaba 10j ,
1). @ switch C AUTO (Up) , E -has * STABILIZE <–> # RTL , G - Has * RTL <–># AUTO,
2). @ switch C ALTITUDE HOLD (CENTER) , E -has * STABILIZE <–> # RTL , G - Has * LOITER <–> #ALTITUDE HOLD,
3). @ switch C ALTITUDE HOLD( DOWN) , E -has * AUTO <–> # RTL , G - Has * STABILIZE <–> #ALTITUDE HOLD,
I NEED THE OPERATIONAL FUNCTION TO AVOID CRASH DURING LANDING, IS IT POSSIBLE TO SWITCH ON MANUAL MODES WHILE THE DRONE IS COMPLETE IT MISSION FOR LANDING. TO AVOID CRASHING,
THE T ELEMENTARY (GPS) WAS NOT ON OPEN SPACE, IT CALCULATED THE POSITION NOT THE PREVIOUS TAKE OFF POSITION IN RADIUS OF 2.5M . DURING AUTO FLIGHT.
YOUR ASSISTANCE WOULD BE GREATLY APPRECIATED AN ASSISTANCE,
I already have the T-motor datalink and have set the correct firmware to match the U8II-85KV motors. Thanks for the recommendation.
I know the Alpha 60 ESCs I am using have an RPM signal wire for this I just haven’t heard of a way to use this info in conjunction with the pixhawk yet.
T-motor protocol is not supported at the moment, it is a shame because big aircraft are the more prone to desync and in the vast majority use T-motor and Hobbywing Escs, wich are both not supported. In all these desync probs we see recently having a log of what really the esc is doing would be great.
This was not the reason for the de-sync issue in question. I already have the proper firmware written to the ESC by using the DataLink.
On a side note, I repaired the copter, re-calibrated ESCs and set the Mot_Spin_Min to .35 and flew an auto mission without issue.