Hi,
I’m having problem with my aircraft. Did a small cruise with althold mode and if switched to stabilize, aircraft just landed, throttle stick didn’t work at all. Happened many times, even with full battery.
Your copter looks over-weighted or imbalanced. Even in AltHold mode it doesn’t hold altitude well.
And it by your log it seems the unwanted descend was started even before the Stab mode was enabled.
Check your Desired climb rate VS actual climb rate - they’re not consistent.
Also more important thing - some RCOUT are close to max value. This is a bad sign.
Yeah, the aircraft may be a little underpowered, but that hasn’t been the problem so far, even with the windy days. Today when the problem occurred, it was really nice and calm.
Before descend started the RCOUT are hight but more or less balanced.
Then with altitude grow, the YAW error is also begins to grow.
To fix the yaw error, controller need to decrease throttle of some motors. As a result there the thrust isn’t enough to maintain the altitude.
So beside the underpower, I can also assume a mechanical problem - propeller are not in a same plane.
Yaw reset was done before the vehicle started to descend…
Also first picture with longer flight, there was no yaw reset at the end of the flight. I get yaw reset every flight I make and there has never been issues.
First thoughts were vibrations… but it’s a 10kg aircraft with 15’’ props, so few spikes over 30 should be reasonable… Center of gravity is on point. Why 2 motors are with higher PWM, are probably cause of wind.
ALT-HOLD does not use the GPS but Stabilize does. So you probably do not have adequate GPS lock, when you switch over from ALT-HOLD to Stabilize it is probably landing due to lack of GPS lock.
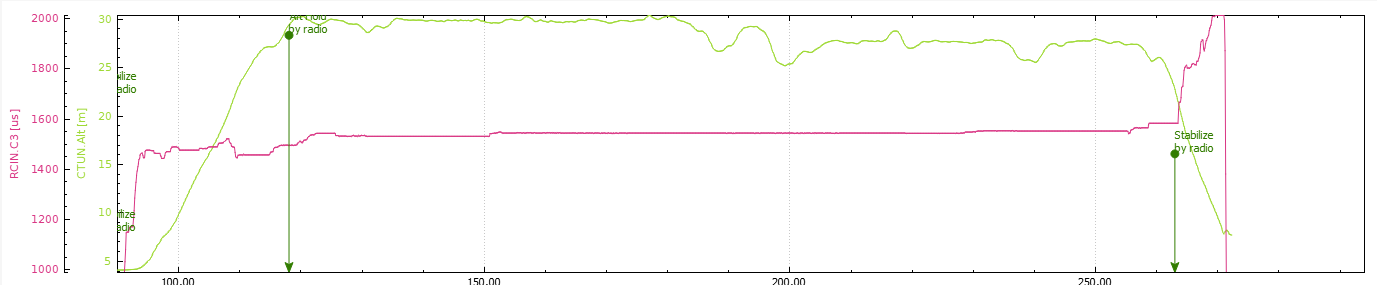
Looking at Nsats log, there is stable 18sats in short flight but indeed first log, we may see a sat spikes down…
Weird thing is motor 2. RcOut2, it goes maximum in the flight controller logs, but according to logs from ESC-s, there is no stable full throttle… also there was no sound like the motor has maxed out. And the aircraft didn’t spin… Esc signal wires and current cables are running in the same carbon tube… may the magnetic interference make this anomaly?
^ This is the issue. You confused the yaw error he was speaking of with the “in flight Yaw reset” message which is normal.
Make sure your props are level with each other. The CG can be okay, but with misaligned props, the center of lift will not be directly under the CG. This causes an unwanted torque that the FC automatically corrects for.
Your aircraft is under powered (you should aim for a stable hover at 60-70% throttle) and has an inherent clockwise torque so it spins the clockwise motors faster to correct for this.
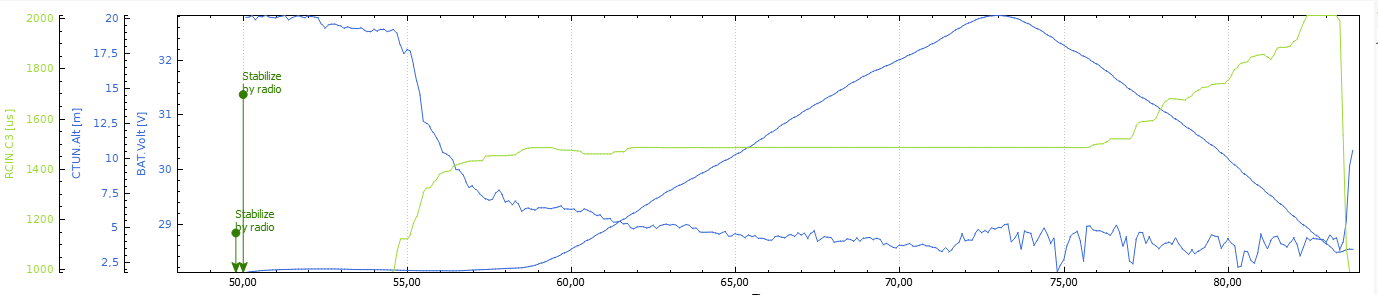
The problem is exasperated as the voltage drops, eventually the clockwise motors are spinning at 100% and to maintain control the FC has to bring down the power to the rest of the motors so that the 100% clockwise correction is still enough to maintain control.
Less power to the motors mean less lift, alt drops.
EDIT: The full battery log maxes out the CCW motors, the torque switched directions between flights, maybe the motor mounts are loose, or you rebuilt it between flights.
Thank you for the answer.
Funny thing is, it still hovers with 50% of throttle according to transmitter…
About the full battery log- nothing was rebuilt during two flights, I’ll recheck the motor mounts to see if the problem may be there.
I’ll see if I can fix the mechanical tilted motors problem and try bigger 16-17’’ props to reduce the underpower problem.