Are you using Kakute F7 too?
No, I’m using omnibus nano v6
Okay… I just asked because I am suspicious that the Kakute F7 is having a problem with voltage below 6V, not the ESC… 
A few years ago, I built a 1s copter, before any 1s flight controllers were available.
I basically cut the traces around the FC’s on board power supply and connected a pololu step up/step down regulator in its place. The pololu regulators are tiny so didn’t add much weight.
Okay. Thanks for the tip. I have some Pololu step-down voltage regulators to 5V and to 3.3V, but not a step-up. I will order some and test, just to try to isolate the problem. Anyway, this trick will make me loose the voltage measurement in the flight controller, right? Maybe I will have to use an external voltage sensor or use a BLHeli32 ESC with telemetry. The problem is to find a light weigh BLHeli32 4 in 1 ESC. The lighter one I found is around 10g. I have a friend that is trying to hard remove the LVC from some ESCs for me. He is expert in electronics. In the first analysis, it seems you just have to remove some resistors. In parallel, I’m studying the BLHeli_S firmware source code as well. I found a function that reads the input voltage and check it’s value. It’s Assembly, and I’ve never used it. Let’s see what we can get…
Ops… I just realized that the voltage regulator in you post do the up and down in one device… Hmmm… Much better! 
I was able to get the voltage measurement to work… I figured out which pin was doing the voltage measurement and traced that back to a little voltage divider (two resistors). The voltage divider is necessary, so I cut the trace that was coming from I think the battery pad which I was no longer using, and connected a wire from the voltage divider to my battery… I don’t know where that is on the kakute, but I’m pretty sure it will have a similar setup… bat pad to voltage divider to pin on the processor.
Let me know if you have any luck w/ the LVC on the ESC’s!
Hmmm… Okay!
I will try to do this.
I keep you informed about the ESC hack trying…
Regards!
In the last days, I’ve tested the behavior of some ESCs regarding voltage. This is what I got:
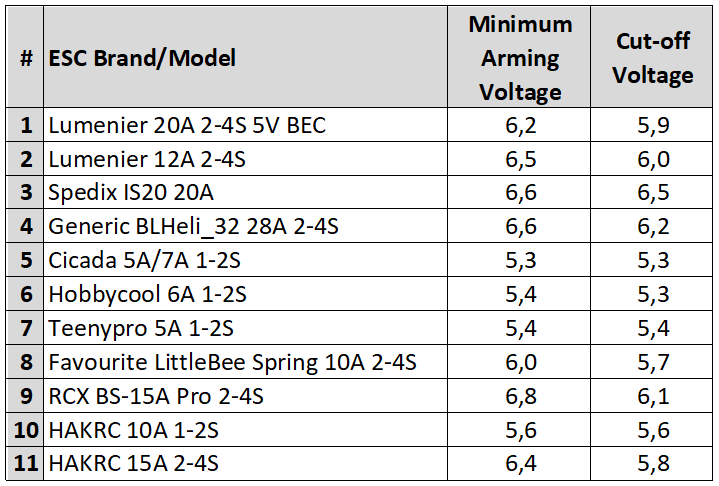
These were bench tests. Now I will make real endurance tests with the drone. It seems that we can get all the energy of Li-Ion 2S battery in this case if the ESC is compliant with 1S battery. An important observation is that when the voltage drops to 5.3V the RC receiver stops working. Maybe a step up/step down 5V regulator could solve this. The Teenypro ESC gets too hot and stops working when using with mid-hi throttle. I hope to find one that works well in real experiments.
Regards!
That’s great information!
I can add that the Aikon ak32pin 35A is good down to about 5.3-5.4v. (based on my onboard voltage sensor, which might not be accurate).
But, I’m a little upset that the product literature specifically says it supports current over telemetry, when it really doesn’t… After a month of emailing them almost daily, I finally got someone from aikon to reply and say, no, their published specs are wrong! urg… But, it is good down to a low voltage.
Hmmm… I will order one unit of this Aikon model for testing. Do you know the exact weight of it?
No… Probably relatively heavy, though… It has a thick PCB, and big current sensor resistor. I’ve only got one and it’s installed, so I can’t weigh it.
One more resource for those who wants to assembly one of this:
Regards!
5 Likes
WOW- That is the BEST video I have ever seen! Amazing work on both the copter design and assembly video.
Joe
1 Like
Thanks, man… don’t forget to leave your “like” there !
very nice seems like a lot of modeling work for me.
but were are the real flight videos and pictures?
I’m only testing in hovering at the moment.
I will do some real flight tests soon. I’m solving some communication issues with XBee radio…
Regards!
i am not familiar with XBee, but if this is only a serial telemetry why not save some grams and use the frsky r9 or dragonlink?
I’m using R9 MM telemetry. The XBee is for communication with the companion computer (NanoPi NEO Air). Btw, I’d like to find a way to receive the R9 MM telemetry on the Taranis and on a ground station as well…
1 Like
Hi Ricardo, your 3D animation is awesome. May I know your email address? Best regards…