When I takeoff the drone seems to be stable in place, after a few seconds it start to drift very strongly backwards. In this case I need to put quite a lot of stick to stop the backward flight.
I have verified that the motors are horizontal and have verified that drone is level horizon.
The pixracer is not in the drone c.g. but I don’t understand why this will cause this phenomena (INs parameters were updated).
I don’t see anything that indicates that there could be anything wrong with the drone or its configuration. I see the Alt_Hold mode is doing just what it should. Just as a reminder to let you know that the alt_hold flight mode only keeps the drone attitude level, but does not hold the horizontal position. For this you should use a flight mode like Loiter.
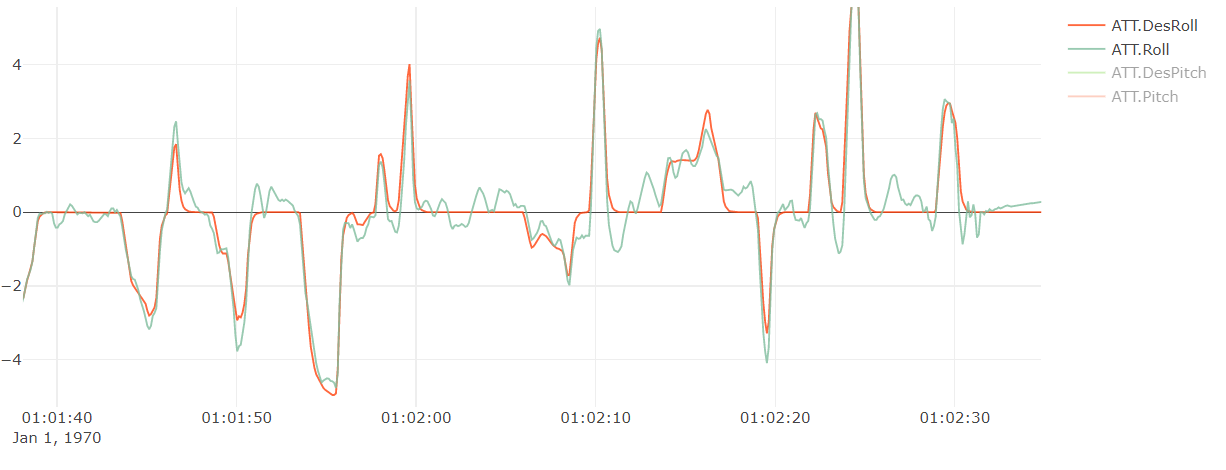
One thing I have seen is that the drone in my opinion is poorly tuned, this can be seen by the irregular differences between the ATT.Des and ATT graphs. These graphs should track each other smoothly and accurately in a well-tuned drone. This could also be contributing to the problem you’re describing.