I put an upgrade option to make RC8_OPTION default to 32. So the user would not have to change anything with there setup.
last working for me was 3.5.4 (old one).
I am not new.
my first steps in diydrones and ppz were in in 2007 …
@iampete that PR should have only gone into 3.7. There was a change from 3.6 to 3.7 that allowed me to more easily implement this. So it didn’t get backported to 3.6… at least not that I’m aware of.
@bnsgeyer this appears to be version 3.6.7 which is the current stable release. 3.7 is alpha status yet, not even released for beta testing.
but they may have had something else already on RC8_OPTION and not got the new default. But it seems like it is not this issue in any case
@imed_limaiem I loaded AC 3.6.7 on a pixhawk 1 and tested the RSC output on servo 5 and 8. The outputs were all normal. I even put the rsc output on both 5 and 6 at the same time. no issues. So I’m not sure why you are seeing this abnormal output.
So I might suggest that you reset your parameters. before you do though, save them to a file. You can reset your parameters as described here. See if the rsc output works properly on servo8 and if it works, then switch it to 5. Then if all goes well with that, then start changing the parameters for your configuration using your saved parameter file. You can use full parameter list screen on config/tuning and click compare params. this shows you the parameters that are different and then you can choose which ones to change. Let me know how it goes.
Hello
Thanks for all tests and investigations.
In will reset the board and let you know.
Regards
@![]() bnsgeyer after the reset I am trying to re-implement my parameters. One by one.
bnsgeyer after the reset I am trying to re-implement my parameters. One by one.
Now I have clarification question about Interlock implementation.
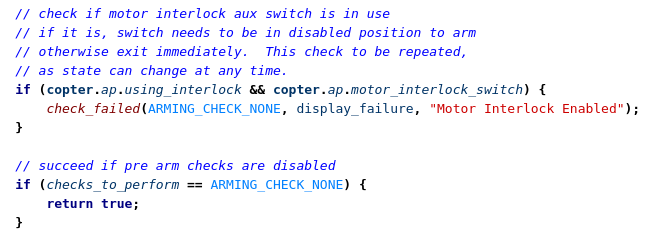
Suppose I am not having any channel affected to interlock (32). I am still supposed to get the error message “Motor Interlock Enabled” ? In my case I am observing this.
As I understand the code below, if I have the error “Motor Interlock Enabled” it means that ap.motor_interlock_switch is true (ap.using_interlock is already true because we are in HELI).
how ap.motor_interlock_switch is initiated if we do not have a dedicated Interlock channel ?
Since I have a 6 channel receiver  I need to affect the 6th channel either to arm/disam or interlock.
I need to affect the 6th channel either to arm/disam or interlock.
Thanks for your help.
If you only have a 6 channel receiver then ArduCopter 3.6.7 will not allow you to control the motor interlock. If you had an 8 channel receiver then you could put the interlock switch on channels 7-12 but it does initially default to channel 8. Master has a change that allows functions to be assigned to each RC channel. I recently made a change to master that also moves the input of the rc channel, if you were using RSC mode 1, to follow the channel assigned to motor interlock. In 3.6.7, even if you moved the motor interlock switch to channel 7, the input for RSC mode 1 is still taken from RC channel 8.
So I’m sorry that you aren’t able to use a 6 channel receiver. If you used a PPM encoder, that would allow you connect channel 6 to the flight controller channel 8. but you can either wait for AC 3.7.0 to be released or buy an 8 channel receiver.
6 channel RX ???
Sorry to say, you and Chris wasted a lot of your important time!!!
Well, following the last precious information from Chris I just need to connect the ch6 of the receiver into ch8 of a ppm encoder.
As I understood ch6 are sufficient (I flight it manually) thro+roll+elev+rudd+flight mode+interlock(or arm/disarm that was my initial set up when I postes the question). Correct me if I am wrong.
However 8ch is recommended and would be better for sure.
Again thank you all for your precious time in solving this.
Hi all first basic flight today.
everything is running fine !
thanks all again
best regards.
1 Like
Bill and Chris. MiniPix manual for helicopter says Ch 3 is throttle but Ch 6 is ESC for electric motor control. But, almost all questions and reply indicate throttle on Ch6.
I am setting up MiniPix in a older modified Kyushu EP Concept Heli, converted to flybarless. It uses mechanical mixing. Setup H1. So I have an ESC for power and a single servo for collective. Please advise.
what version of firmware? In Copter 3.5 and newer, the RC inputs have been separated from the servo outputs. Is your question regarding input or output?
Bill,
It is V 3.5.7 as I read it in MP.
I collected the parameters from my JCZK G450L helicopter and converted it to the Concept helicopter.
Ed

Bill, Another need.
MP lists discrete numbers for the assigned functions of servos. BUT, on my PC screen I can not see functions beyond number 16…
Is there a downloadable list of them? Or can the all be seen in MP?
Ed
Here are the assignments for heli’s
Left front swash servo/ aileron 33
Right front swash servo/ elevator 34
Rear swash servo / collective 35
Tail rotor/rudder. 36
Main rotor speed control/ ESC 31
Hope this helps
Bill,
Will these same parameter numbers apply to my EP Concepts mechanical mixing swashplate servos. IE: aileron servo 33, elevator servo 34 and then the single servo for collective servo 35?
Since we choose the H! mechanical mixing in MP, does the MP automatically output collective function for servo 35, or must I add a mixing from throttle to Ch 6?
No. once you choose the swash type, the mixing is done for you. It will automatically output the aileron, elevator and collective to the correct servos as listed.