I have a problem with my quad. I have a twitching in the front left arm, i changed motor esc everything between the cube and the motor. All is fine, but at one point it will start to twitch. I looked into the files, there is no signal coming from the cube towards the esc/motor. i can only see the correction from the autopilot. I am using kiss esc in dshot150. I had checked to see if i have a short problem with my carbon fiber frame, but it was ok. I swipe motors with esc between them, same effect. The log files just show only the correction. thanks
So, the frame is big, is not a racing quad, it is more of a cinematic one. the esc are kiss-32 amp, here is the thing, i changed the esc and the motor with brand new ones, and it is still doing the same thing. I have another build same hardware and it flies with no issues. with this one i try some new stuff . I checked every wire, doublechecked, changed the ones that are suspect, still same result. if you look at the log file, you will notice that this twitch is not coming as a command, it is just doing it by itself.
Last log file where i kinda played with closer to the ground, but the twitching happens also at altitude. https://easyupload.io/nq0f4a
I don’t think that the props and motor. it looks to be more on the electrical part. like I said I changed everything and it is still doing the same thing.
Thanks very much for the help, me and a friend of mine are trying to figure out wtf is going on.
Not related but you should probably change these:
INS_HNTCH_REF,0.452
INS_HNTCH_BW,27
Is the static notch needed? I’m just cautious about getting into low frequencies
This could probably be safely set
ATC_THR_MIX_MAN,0.5
and these look VERY low
MOT_SPIN_MIN,0.05
MOT_SPIN_ARM,0.03
But back to the problem
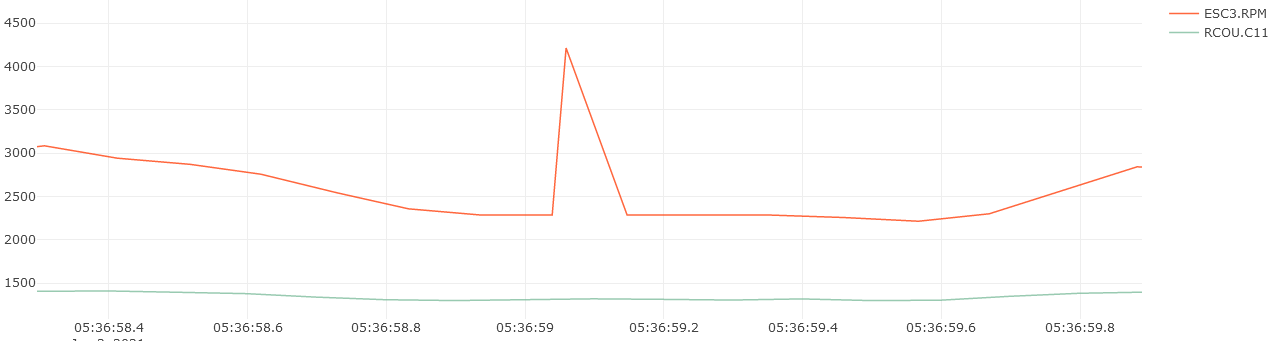
There are some spikes in motor 3 RPM where there aren’t matching input from the FC, like this one
It’s a bit like a desync or prop is slipping, but I’m hesitating to say that is the definitive answer.
You could try using DSHOT300 or 600, MOT_PWM_TYPE 5 or 6. Although you’d expect problems on other motor/ESCs too…
Those ESCs don’t have settings you can change either. You might be better off with BLHELI32 ESCs and disable Low RPM Power Protect and Low Voltage Protect. There’s plenty more in them that can be adjusted too, but usually no need except for the two I mentioned.
In this case a desync is possible, but prop slippage is not.
The motors are custom, but from what I can recall they are a 3508-500. Props are a 16x5.5 carbon prop, these are also custom, but are similar to all the generic mutli-rotor props around that size.
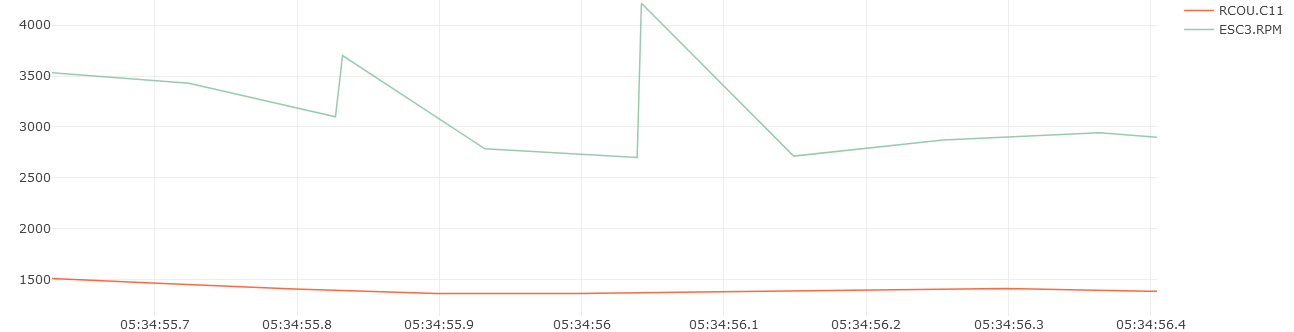
Here is another log file where I bumped the RCOU logging to 400Hz. Makes it a bit easier to see what’s going on
The strangest part is that no matter what I swap around the glitch always prefers front-left downward motion, I’ve never seen any glitching toward the front-right or rear-left I wonder if frame twist/balance is causing that motor to work a little harder or easier? Also sometimes (as in 213.BIN) the glitch occurs very frequently, while other times it rarely/never happens. This system had several hours of flight before this problem cropped up. I suspect when I try again tomorrow morning it goes back to normal. Other systems have also been flying fine.
I configured the system for PWM output and it flew fine for about 10 seconds then a massive glitch (front-left again) caused a crash. On yet another test flight there was a large twitch concurrent with telemetry starting from ESC4, not sure why the telemetry wasn’t working before this moment when it has been working otherwise fine. This makes me suspect some signal integrity issues (doesn’t make sense with front-left only though) maybe we need to try shielding the signal wires to the esc?