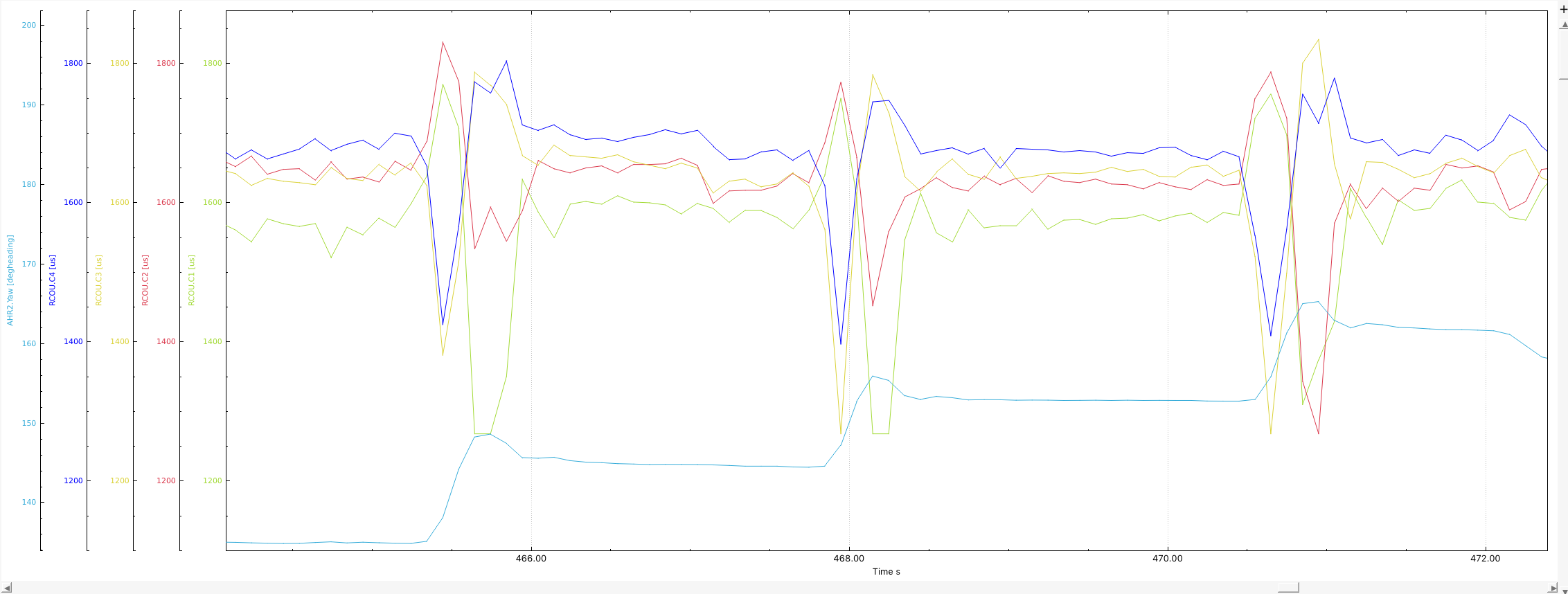
Did an autotune on yaw this afternoon and it completed without issues (previously i had done pitch and roll autotune without any prob). Problem is that now if i apply yaw on rotation stop it glitches on roll and pitch in a diagonal movement.
It can be clearly seen in the attached log at time 465.8s - 468.3s - 470s. If you look at pitch and roll against desired roll and pitch the glitches can be seen right in the moment the aircraft stops the yaw movement.
Quad
25KG Auw
Hobbywing X8 motor+esc combo
30" Blades
12 S
AC 3.6.8
Log: https://drive.google.com/open?id=1SUDaKMXeVSlibO2IZJD-WY8RVn7Zjp0o