I’m trying to get my PID tuning correctly and any help would be appreciated. I need to make a pivot turn ( 90 degrees to the left/ right depending on the waypoint ). It would sometimes make the turn correctly but sometimes it would make the pivot in the other direction to make the turn. Not that it is an issue but it is random. This issue occurs a lot of times with the same waypoints but if I re run it, 1 in 5 tries it would do it correctly. I have played around with the PID tuning and sometimes the PIDacheived and the PIDdesired would be in opposite directions. Again, it happens randomly and sometimes it would do it correctly. when the PIDacheived and the PIDdesired are aligned. Any help would be greatly appreciated.
Post a logfile of the vehicle in ACRO and AUTO modes showing the issue.
Here is the logfile.
That’s a zip file of ~30 tlogs. That’s not what I need.
What I need is a single bin log from the Flight Controller’s SD card showing the issue.
There’s the log file.
Ok, here’s a look at your steering PID’s in ACRO mode:

And Steering rate with Steering servo outputs:
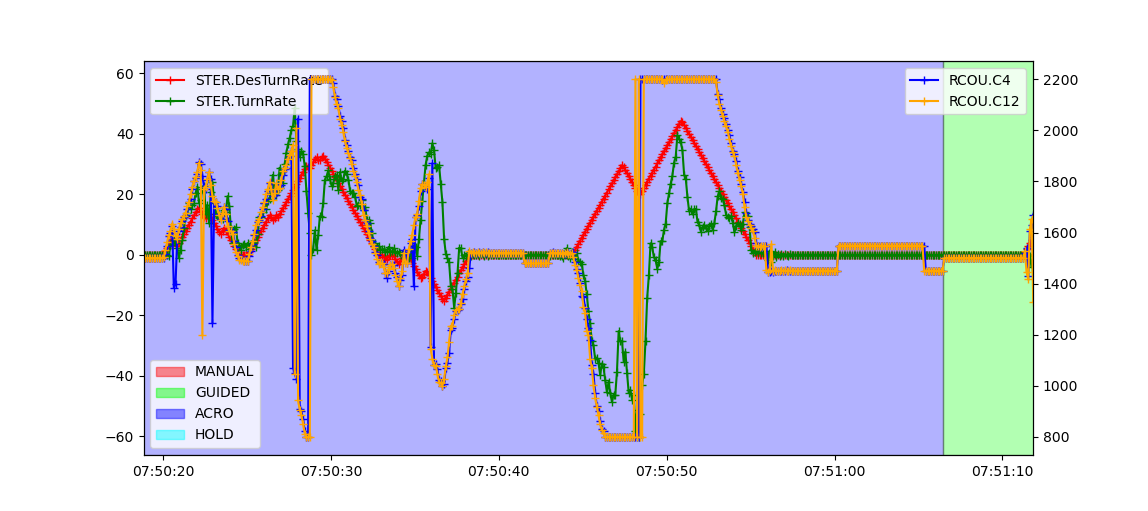
Note that, in the above plot, the Desired Turn rate and (Actual) Turn rate are sometimes opposite. This could indicate some issue with the mechanical setup of the steering system.
According to your logfile, you have:
- Servo 3 = Throttle
- Servo 4 = Steering
- Servo 12 = Steering
Could you confirm this is how you’ve connected the servos?
I note you have 2 servos on steering. Is this intentional? Do both of these steer in the same direction?
Hi,
Sorry for the late reply.
We did verify the issue and it was fixed immediately. The opposite turning did stop and is now well functional. I had another question regarding the steering. The rover works fine after tuning the PID in acro mode but when using it in Auto mode during a mission where the waypoints are close it tends to overshoot the turns to reach the waypoints and is not able to reach the waypoint in the desired manner.( The waypoints are in a straight line so it does not need to turn, small corrections are a possiblity but it usually overshoots in auto mode ) Is it possible to pivot turn before moving to the next waypoint. There is no condition_yaw command like the copter before moving.
Can you post a log of this occurring?
Here is the logfile.
Trying increasing PSC_VEL_P to 2 or higher (maybe even up to 5 or so) to increase the tracking aggressiveness.
Hi,
It did reduce the error. I have another question, is there any way in a rover I can make it pivot before moving to head to the next waypoint?