hello guys successfully autotuned my big quad i.e. of 15kgs and i use t-motor mn8014 12S 22000mah and 30*10.5 propeller’s had sended my quadcopter to 18.5m/s but it started wobbling while braking from it .i changed damper as i considered it as a problem but the wobbling remains the same.
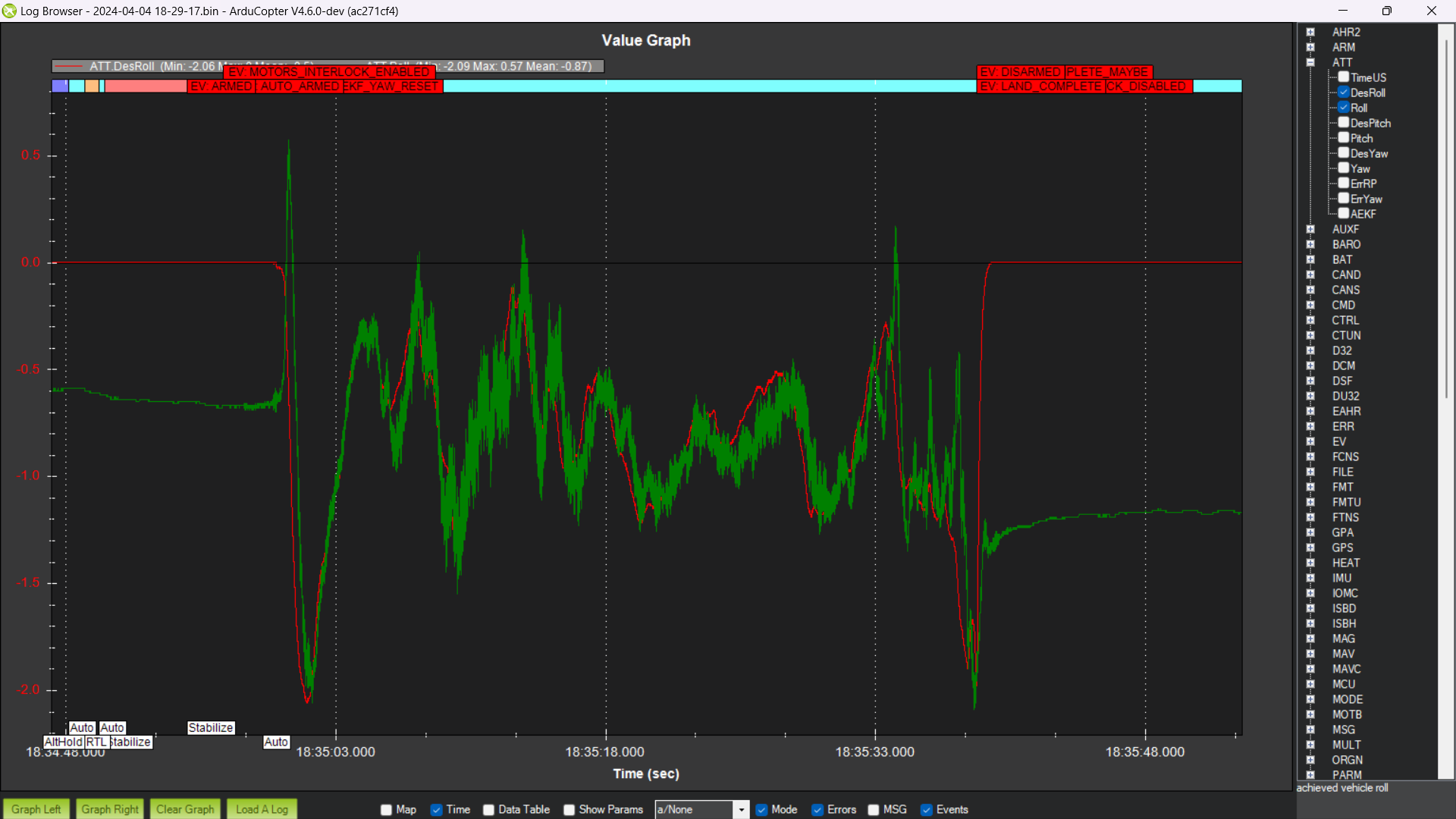
when i review a log of the flight i noticed that the actual pitch and roll signal is too noisy by the pixhawk
what should i do now
i am attaching the log file for same
attaching 3 log files one for 18m/s no wobble
one for 18.5m/s and one for todays flight
images of my problem
Some of that “noise” in the log is just from the fast attitude logging, just set LOG_BITMASK,180222 for a cleaner look to the graphs.
Also you should set ARMING_CHECK,1
For attitude control, I find too aggressive yaw PIDs can take away from pitch and roll a bit, try these:
but otherwise I would try Autotune on pitch and roll axis (not yaw) at AUTOTUNE_AGGR,0.1 This may give an aggressive or “tight” attitude control but then you can easily soften it. Let me know if you have that issue.
The problem may in fact be those motors with such large props cant respond well enough to cope with braking from higher speeds. A smaller prop like 28 inch could give improved control, and you have plenty of available PWM headroom to allow for that.
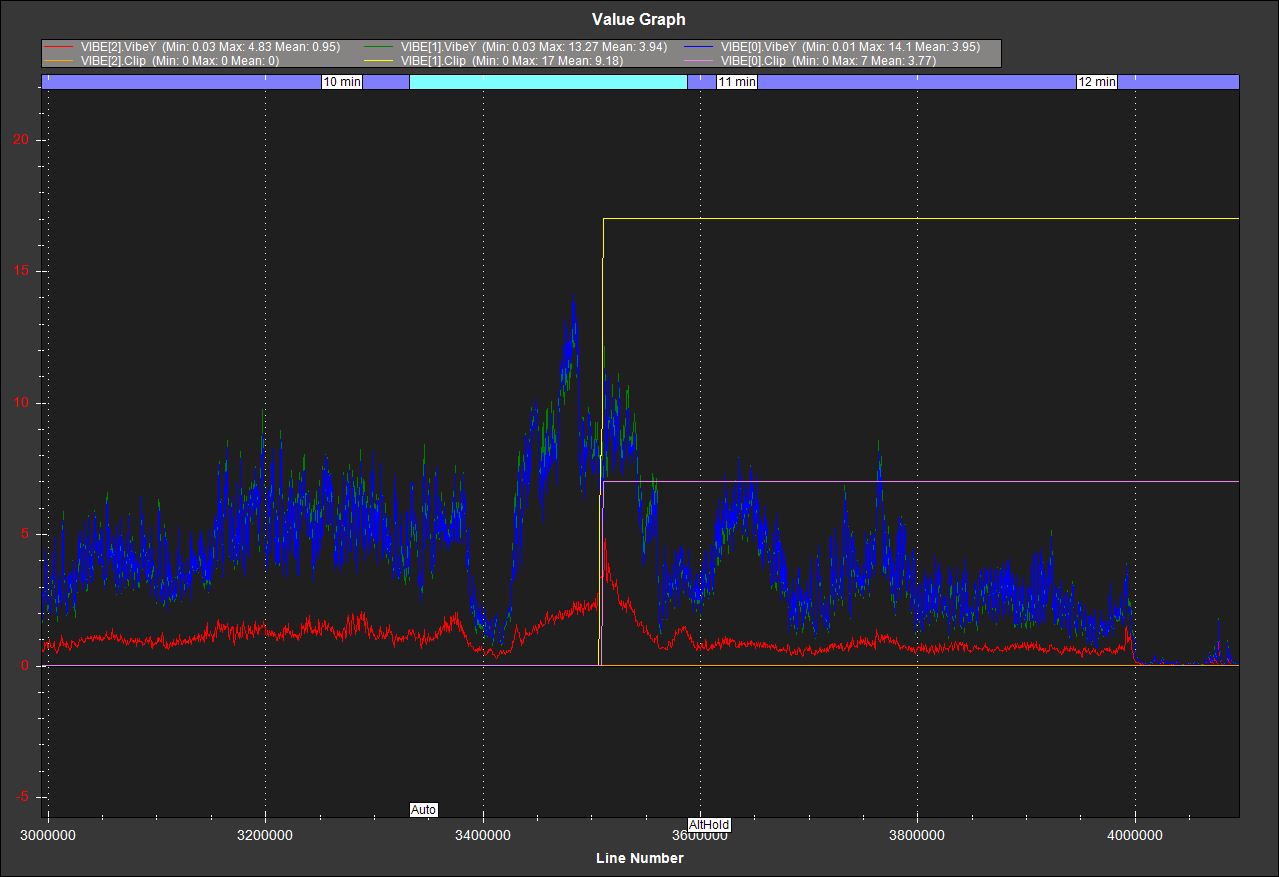
But Shawn my point of concern is that the noise of the signal increased after 18.5m/s flight please tell any other reason for that. I will definitely try the changes you mentioned today
I think there is a missing L-bracket or velcro to prevent the battery from moving when the drone nose is up or down (pitch forward and backward) and causing the Y-CG changes.
Any reason why is your MOT_THST_EXPO,0.2 for a 30" propeller and not 0.77? Not sure does it explain to can’t respond well enough to cope with braking from higher speeds.
I would rather say it would not go to 18.5m/s if it was wrong also if I got a clip once in the vibration would it be as it is or goes to normal ‘0’ after next flight as you can see the log named today_flight has no clip.
I would also definitely check on this also