This has custom firmware:
Simorghsoha Sprayer Firmware V2.0.0 (2d7022e5)
so you might want to contact the seller and see if you can load stable Arducopter firmware.
Dont let them tell you not to be changing anything, because this is far from ready for flight.
Or what I would do is just forge ahead regardless and load the official stable copter firmware.
I’m going to provide all my thoughts and parameters as if you are using an official version of firmware.
No one of these items or sections will fix your copter by magic → it’s a “whole of copter” thing where everything interacts.
Set all the usual safety options for this big copter:
ARMING_CHECK,1
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,2
BATT_ARM_VOLT,22.10
BATT_CRT_VOLT,21.00
BATT_LOW_VOLT,21.60
FENCE_ENABLE,1
I see you already had battery voltage settings close to these, but these are the tested/tried and true values for 6S Lipo.
Physical issues:
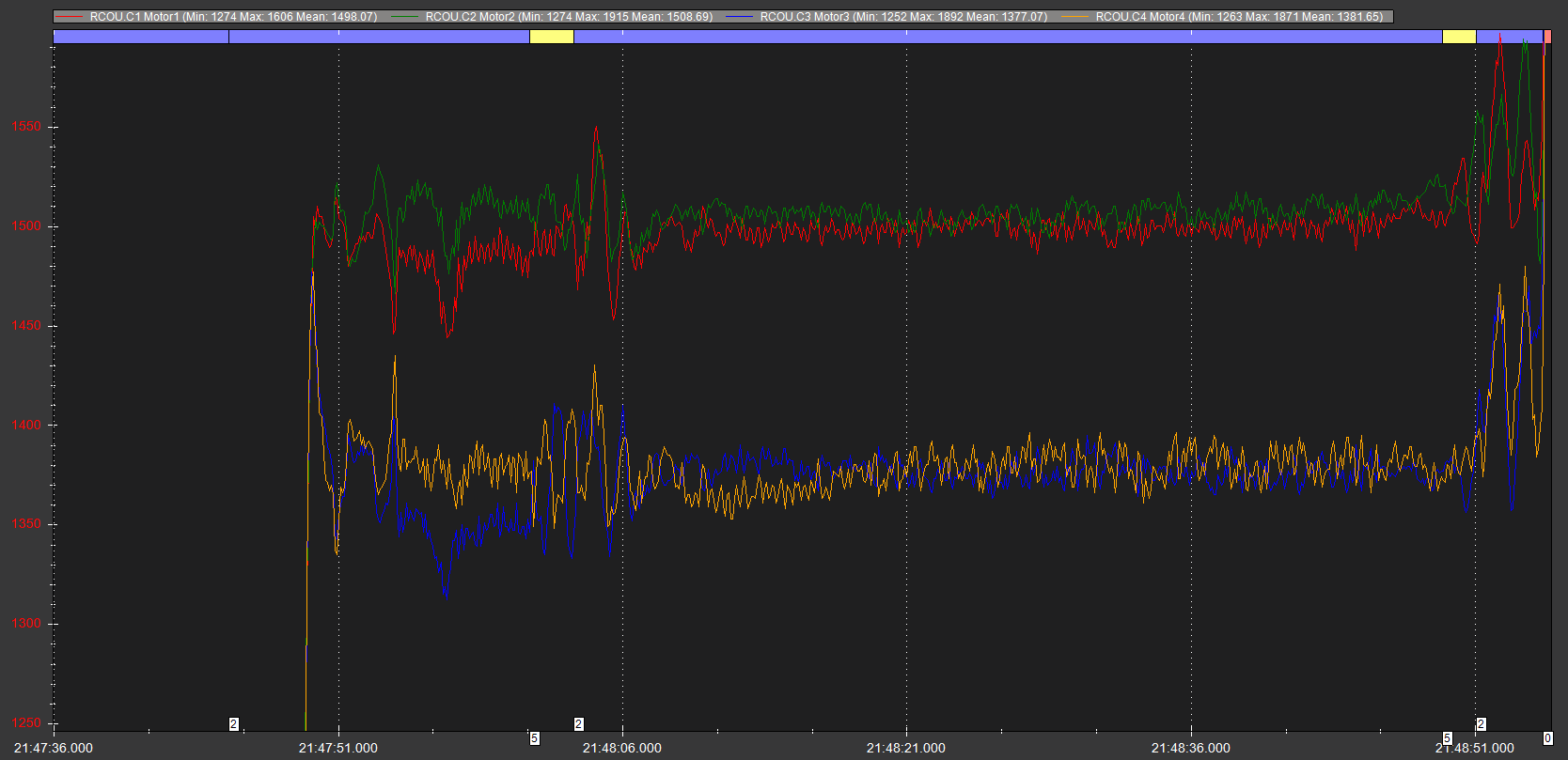
There is a serious bit of motor-mount twist → counter-clockwise motors (1 & 2) have to work much harder than clockwise motors (3 & 4) to make up for the physical yaw bias.
Fix up all the motor mounts so the props spin on exactly the same plane.
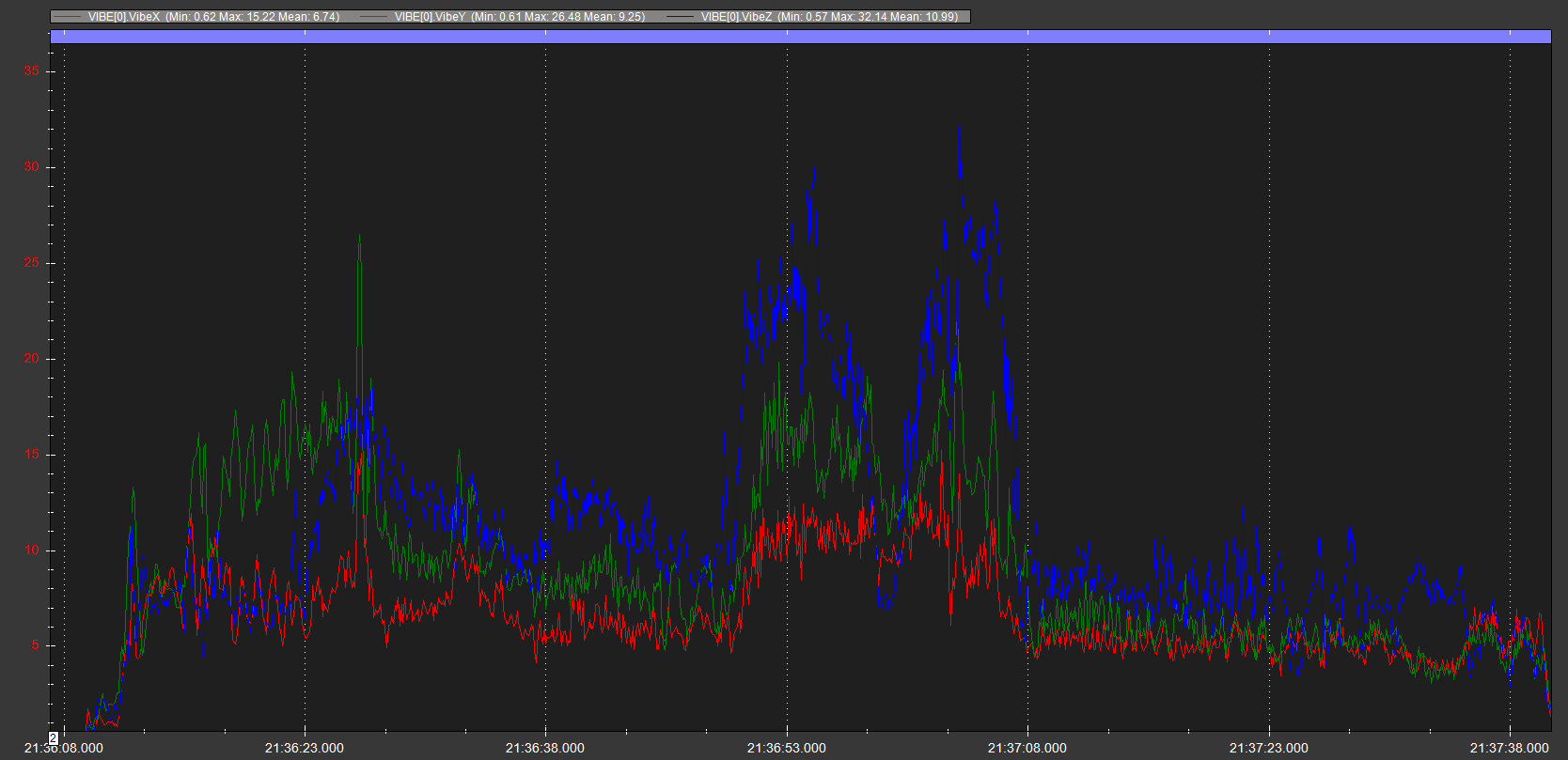
There is some high vibrations you will need to take care of, particularly the Z axis. These vibrations will certainly give you trouble, and we can tell because so far you are just getting airborne and already the vibration levels for Z axis are getting into the danger zone >20
Tuning issues:
PIDs are way too low, try going back to something more standard as a starting point:
ATC_ANG_PIT_P,5
ATC_ANG_RLL_P,5
ATC_INPUT_TC,0.20
ATC_RAT_PIT_D,0.005
ATC_RAT_PIT_I,0.150
ATC_RAT_PIT_P,0.150
ATC_RAT_RLL_D,0.005
ATC_RAT_RLL_I,0.150
ATC_RAT_RLL_P,0.150
General fixes:
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1 // write this then refresh params to see the rest
INS_HNTCH_MODE,1
INS_HNTCH_BW,15
INS_HNTCH_FREQ,30
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_HMNCS,3
INS_HNTCH_REF,0.17
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
LOG_BITMASK,180222
MOT_THST_EXPO,0.4
MOT_PWM_MIN,1100
MOT_PWM_MAX,1940
MOT_BAT_VOLT_MAX,25.20
MOT_BAT_VOLT_MIN,19.80
PSC_ACCZ_I,0.4
PSC_ACCZ_P,0.2
Some of these are specific to your ESCs so be sure to get everything exactly as I have it.
The easy way:
Copy and paste ALL the parameters from above sections into notepad and save as “updates.param”
Then in MissionPlanner full parameter list, “Load from file” → you will have to do this twice because of that enable parameter (or just set it yourself and refresh the parameters before loading from file)
Now go to MissionPlanner motor test.
Check and set MOT_SPIN_ARM and MOT_SPIN_MIN since they will be different now.
MOT_SPIN_ARM should be as low as you can get it and all motors still start up reliably.
Add 0.03 to that value and set MOT_SPIN_MIN
If you’ve done some work to improve vibrations and the motor-mount twist, NOW you can do another test flight 
Take off in AltHold mode and check stability, if it’s OK do some gentle movements, some altitude changes, do the same in Loiter mode if possible.
Let’s see that log.