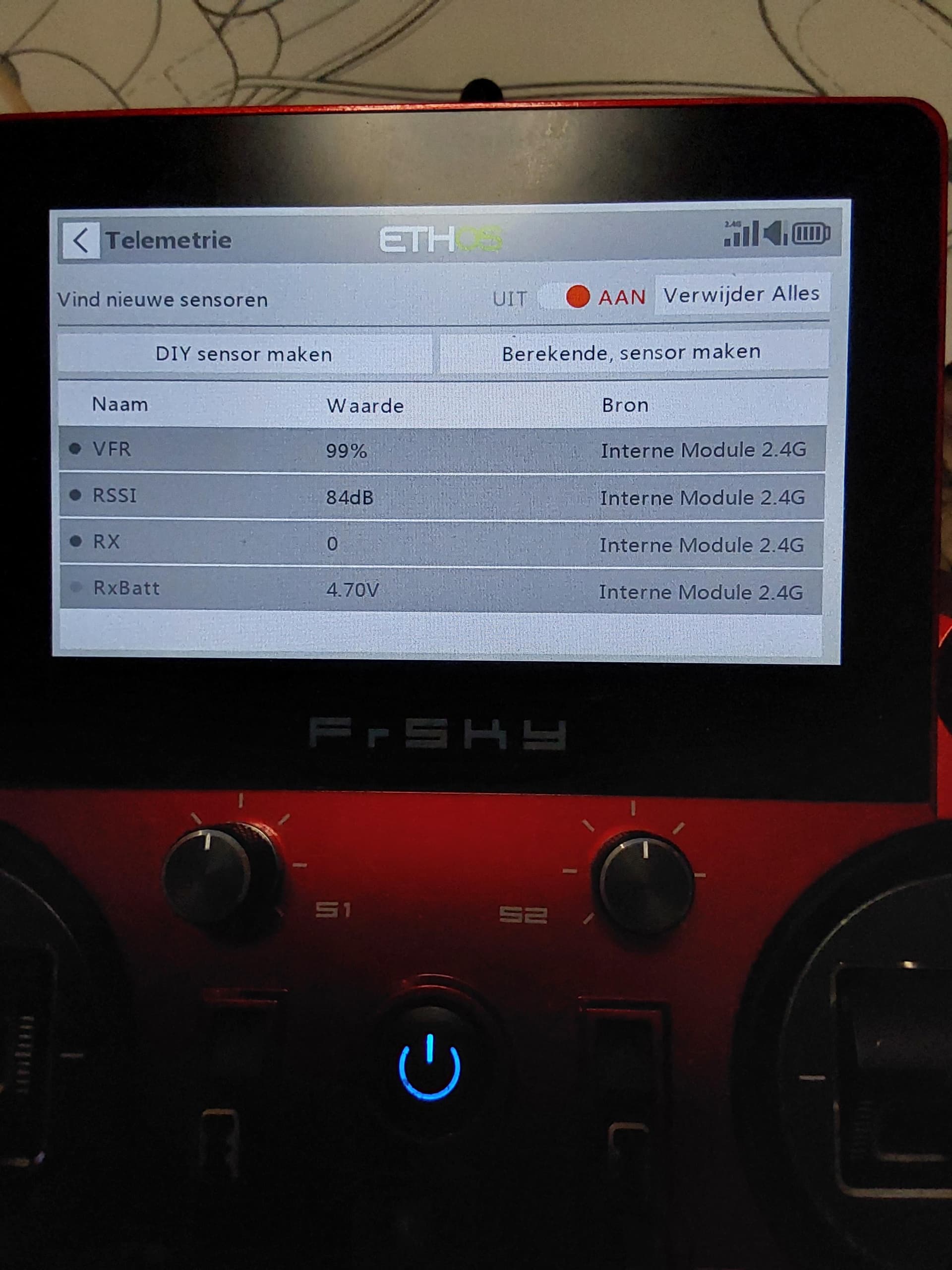
I just tested the yaapu telemetry. No succes.
I realy start to doubt it is working at all.
Theo, you have to use the S.Port Inverted connection on the Archer Plus RS and then configure the port on the Speedybee as described here.
Hello Reinhard,
Thanks for your swift reply.
I did the test with the pin on sport reversed.
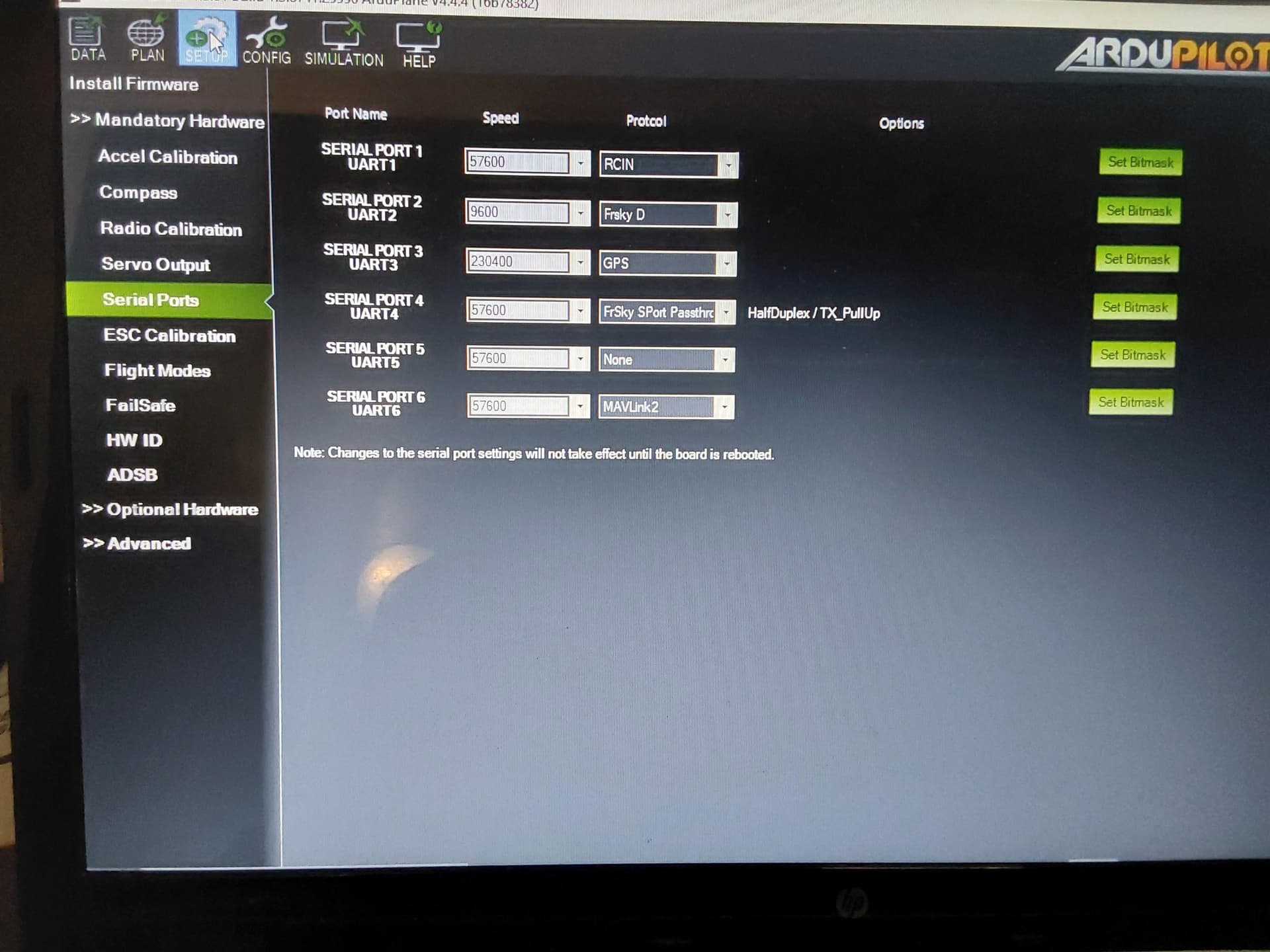
57600 Frsky sPort passthrou halfduplex and TX pullup. No succes.
I made picturesfrom my rx and fc howe it is connected and of the config screens.
Howe to insert pics?
This is what the empty editor says … Drag or paste images
Hello Reinhard,
Mean while I replaced the rs receiver for a g6 with sbus-out and sport.
No succes. However the telemetry is receiving from the rx namly the analog input.
Not telemetry from the FC.

I,am looking for an update of the FC Firmware?
Regards Theo
If you are using a receiver that only has the normal S.Port input, then you must use an external inverter. For example this.
However, if the receiver has an inverted S.Port, it will definitely work. I have already used both options.
On to your SBUS receiver: this is connected to the first connection. This is SERIAL2. You then set it to RCin and remove the RCin from SERIAL1. In any case, “FrSky D” is incorrect for SERIAL 2.
Hello Reinhard,
I will try rs receiver again with sport inverted on serial#1 FrSky D also double check if this is the sbus?
For easy test is it allowed to have both power supply from usb and bat. Connected at the same time?
Thank for your support.
Regards Theo
Verzonden vanaf Outlook voor Android
No. “FrSky D” is for old FrSky receivers. You do not need this protocol.
Yes, of course.
Hello Reinhard,
Looks like a endless story.
Connect sport inverted to tx#1 no telemetry to be clear by telemetry i expect a lot of data from the FC in the screen on the x20s such as yaw,heading etc. Is this correct?
Serial#2 RCin 57600 working ok for servo.
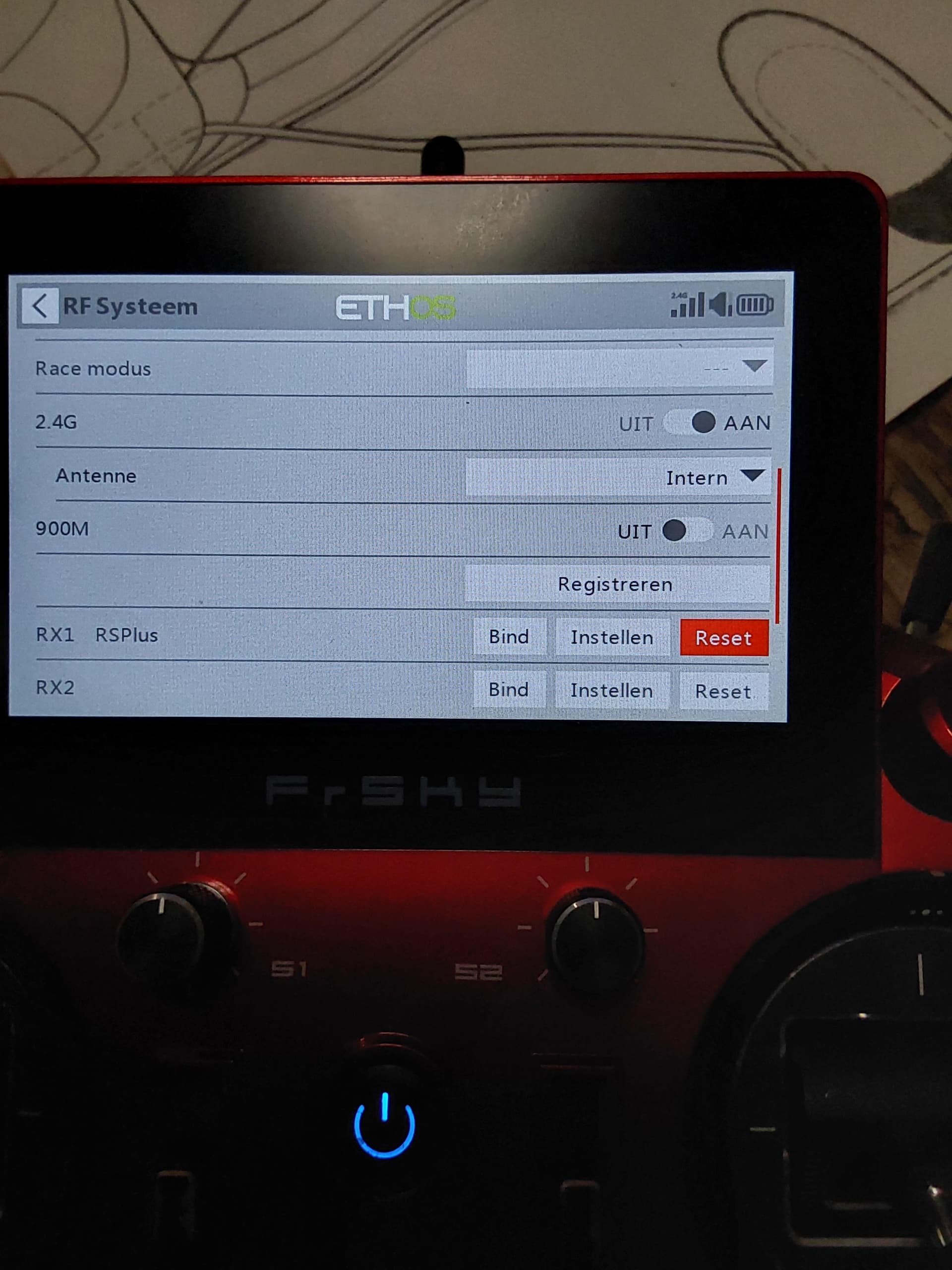
Receiver used rs with sport and inverted sport.
Can I check firmware of the FC ?
Regards Theo
Verzonden vanaf Outlook voor Android
Looks like an old story. F4’s are way past their “sell by” date.
This works for sure …
Inverted S.Port from RX goes to TX1 from Speedybee (plus GND)
SERIAL1_PROTOCOL = 4 (or 10, but then the Yaapu script must be running, test with 4 first)
SERIAL1_OPTIONS = 4 (Half Duplex. or 132 if pull-up from TX must be active)
If this does not work straight away, please upload your parameter file and write which version of Ardupilot you are using.
This is only indirectly a problem with the F4. S.Port from FrSky is actually an inverted signal (like SBUS). However, Ardupilot cannot do anything with this. Unfortunately, the UARTs of the F4 cannot be inverted by software, so you have to do it externally. I linked an external inverter above, which will definitely work. Or a FrSky RX, which has an inverted S.Port (i.e. actually a non-inverted signal).
The problem actually only occurs in the combination of FrSky RX and FC with F4. This combination is also becoming increasingly rare, so it doesn’t really matter. I’m only quite involved in this because I’m doing a workshop on Arduplane here in the local FrSky forum, where the Speedybee Wing serves as the basis.
Best Reinhard,
The story comes to an end. Happely it works.
Nice work now i have the telemetry in my x20s.
I must say a made a test with inav no succes.
Returned ti ardupilot and tested your advice.
Many thanks nice to have had your support and time.
Kind regards,
Theo

Super! What was the problem in the end? It’s always good when we document a mistake here ![]()
Hello Reinhard,
At the end it was a config fault from my side.
Nothing was damaged and/or broken.
I made a correct choice for a receiver with inverted sport.
My tests didn,t include your advice.
The sport signal is halfduplex that was the main reason.
For me this is a very steap learning curve.
But finnaly I will succeed to fly autonomious a glider.
Kind regards, Theo
Ps a f405 mini is on his way for the glider
Also here. One from a local dealer (should be on my work bench next week) and one from China (maybe two weeks)…
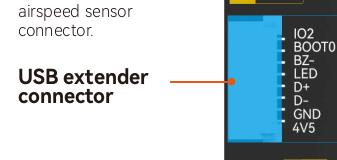
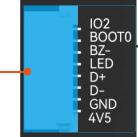
When I look closer to the SpeedyBee documentation, there are some things, I don’t quite get.
This is the connector for the USB adapter
Wing
and Wing mini
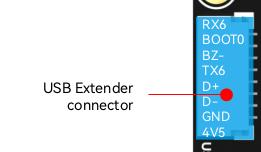
So you have to use that USB thing to get the FC into dfu mode?! I did not see a boot jumper on the FC’s itself. And that IO2 and LED are now RX6 and TX6?
Another thing I don’t get is connecting CRSF/ELRS. The AP Wing documentation mentions
CRSF also requires a TX2 connection, in addition to RX2, and automatically provides telemetry.
but both SpeedyBee manuals point to RX1/TX1? All a bit confusing at the moment …
br KH
The DFU button is on the USB extender.
By default, TX1/RX1 is configured to RCin on both FCs. CRSF works there without further ado.
Which documentation are you looking at? Link?
This is written in the ArduPilot Wiki and is only valid if you want to use UART2 as full UART (default is the inverter for SBUS input).
I know, that this is written in the AP documentation. But SpeedyBee wants the user to connect ELRS/TBS to T1/R1. For Inav and! AP.
Might have to wait till I get the first one here on the table, to clear things. But the problem with such imprecise documentation (but nice colorful pics!) is always, that you could brick things.
At the moment I am fighting a bit with a Kakute F7 and ELRS with an telemetry issue and I want to do a cross check with those SpeedyBee receivers and possibly change over to those receivers.
About that here, you did not comment. I think, that is a yoke, or?
br KH
In this case, the problem is simply yours. SpeedyBee specifies T1/R1, which is correct. But Ardupilot also states this and that you could also use T2/R2 with a different configuration.