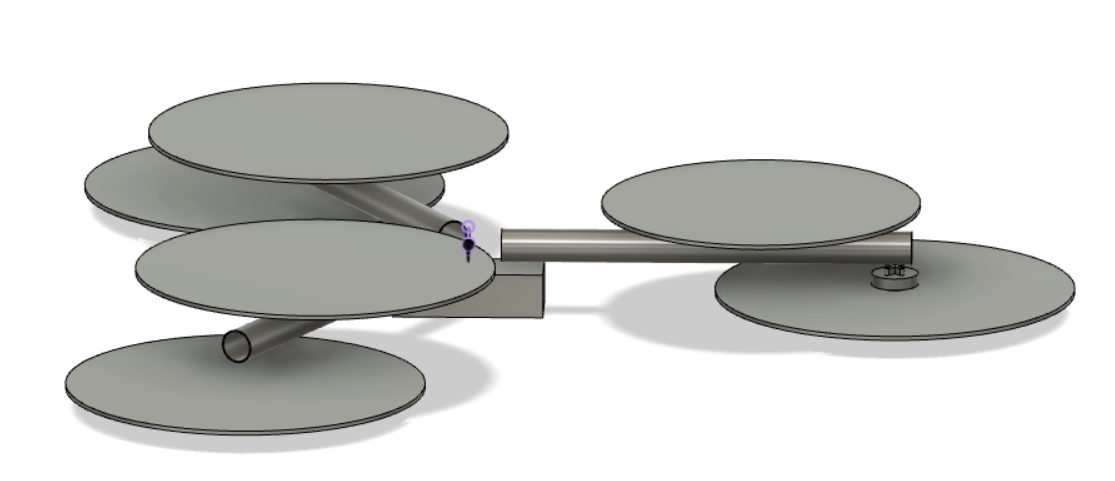
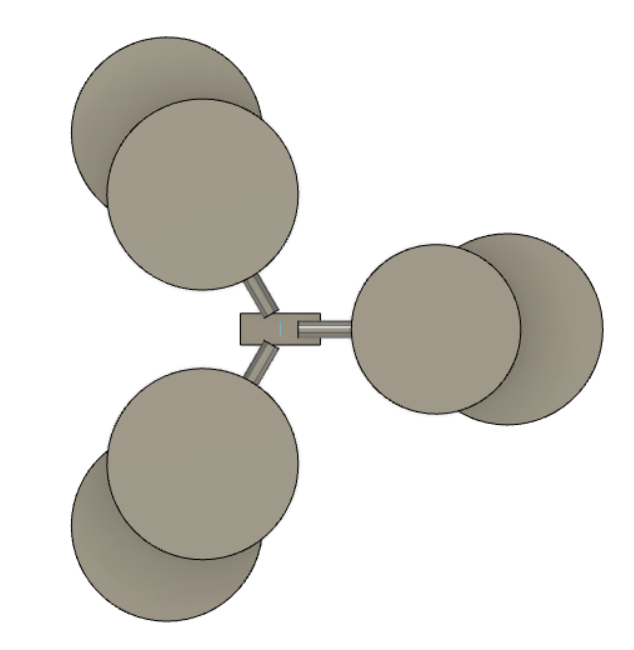
We plan to build a Y6 copter since we need the extra clearance of the 120deg between the arms for an unobstructed view to the front. For extra efficiency we thought of having the two motors on each arm not axial aligned but have some separation between (see drawings). Has anybody designed such a configuration and is ardupilot capable of stabilizing this configuration even in a event of one motor failure?
Thanks for your opinion
1 Like
It’s not the answer to your question, but this article might be of some use for efficiency…
https://eprints.soton.ac.uk/433170/
Thanks for the interesting paper. I am wondering if nobody ever tested such a setup?
It looks like a vibration problem waiting to happen…
Can you be more specific? I would especially use larger diameter CFRP carbon pullwinding tubes and carbon motor mounts.