Hi All,
I am quite sure that I am reading the wiki right. http://ardupilot.org/plane/docs/quadplane-auto-mode.html
With a basic quad plane, its states that if I do the following mission (actually carbon copy if the example given there):
Vtol_takeoff
Waypoint 1
Waypoint 2
etc…
Switch to auto, then after take off in quad mode, it is supposed to go to the set altitude, then (auto) transition to fixed wing mode and carry on like that to next waypoint.
Well this is not what is happening for me. It just continues to waypoing in quad mode.
The only way I could get the transition done as planed is if I added the transition command in the mission
Vtol_takeoff
Do_Vtol_Transition 4
Waypoint 1
Waypoint 2
etc…
I am not lazy to add these to the mission, but just wondering why the wiki says otherwise or I might have missed something.
On a similar note, I had the following happen in a mission I did today.
Vtol_takeoff
Do_Vtol_Transition 4
Waypoint 1
Waypoint 2
Waypoint 3
Vtol_land
Everything went fine till after WP1 then I decided to switch to loiter (fixed wind loiter). Left it to circle around for a while (testing). Then I went ahead and switch back to auto. From my fixed wind experience, I thought it would continue (in fixed wing mode) to wp 2 then wp 3 then transition and land.
However upon switching to Auto, it went ahead and transition immediately to quad mode and proceeded that way to WP 2.
I don’t have simulator setup, but I am sure this would be easy to test for anyone that does. Without any logs.
Is this normal?
Of course I am happy to upload if you think that is relevant, but this is more about mission and hardly has anything to do with the frame, just stock setup.
I appreciate any input.
@tridge can you please take a look at this issue.
I have tested is several times now to make sure it is not my imagination. All repeated test confirm that if I do not add Do_Vtol_Transition 4 command. Then the quadplane will stay in VTOL mode indefinitely, completing WP in that mode.
To be honest this does not bother me much. Easy to fix I guess in either documentation or (better) the actual firmware.
What does bother me and make the entire thing inconsistent is something that I experienced today.
I uploaded, restarted and executed the following mission.
Vtol_takeoff
Do_Vtol_Transition 4
Waypoint 1
Waypoint 2
Waypoint 3
RTL
I planned to do some inflight calibration of a new compass (and placement) that I was testing.
So for this I swiched to loiter mode right between WP1 and WP2. Plane as expected was already in fixed wing mode after the transition command. After loitering for a bit, I decided to mode the center of the loiter point do a different place. I decided if was easiest to just use “fly to here” aka guided mode. This from on screen of mission planner. All went as expected. After circling for a while, I decided to finish the mission and land. For this I switch mode back to “Auto”. Normally (for my fixed wing experience I expected the plane to start flying to next WP, which was WP2 then to WP3 then RTL, then once inside the RTL radius it would switch to QRTL and land.
This was what was supposed to happen.
Well it did not. As soon as I switched back to Auto mode, the plane instantly transistion into VTOL mode and and proceeded like so.
I am sure you all agree this is not rigth. I will upload my log, but as far as I am aware, then has nothing to do with my setup (which is more or less default).
Again if someone has SITL simulator running (I understand it now support quadplane), can they test this. I just cannot get it working in my Windows PC.
Any input is welcome. Even if it is just someone to confirm that they are indeed not getting the same results as I am and after VTOL take off command with just a WP following, that indeed the plane “auto” transitions as if expected from the the documentation.
Arduplane version 3.8.5 (latest).
I think I figured out the problem. User error as it is so many times the case.
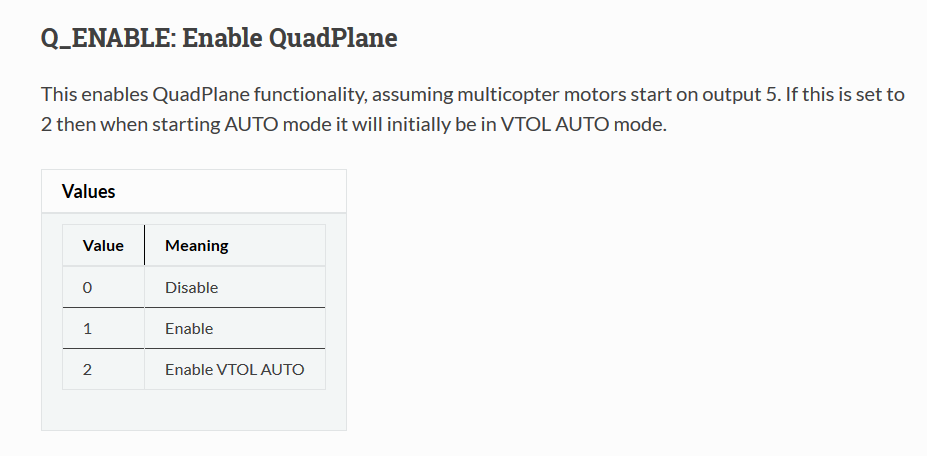
This description was not too clear to me when I set it. I had mine set to 2. I thought it meant like a default startup mode (had is set before I my first flight, so never came to mind after). Now, from this experience I understand what is means. Now it suddenly makes so much sense :).
I will leave it hear in-case it is help to anyone as no one had any input till now on the matter, I am guessing it is not such and obvious thing to spot.
However I have to say that the description can use some more explanation. As if you think about it, I do switch to auto while I am still on the ground, and then I wanted it to be in VTOL mode. The first command is VTOL takeoff. So that is the “initial” thing that is the “starting”. After that takeoff is completed it proceeds to head to a WP that is not longer a “beginning” so to speak.
Same goes for switching from Guided to Auto, which are more or less both similarly “autonomous” modes.
2 Likes