Cube Orange with 4.2 firmware.
Updated bootloader.
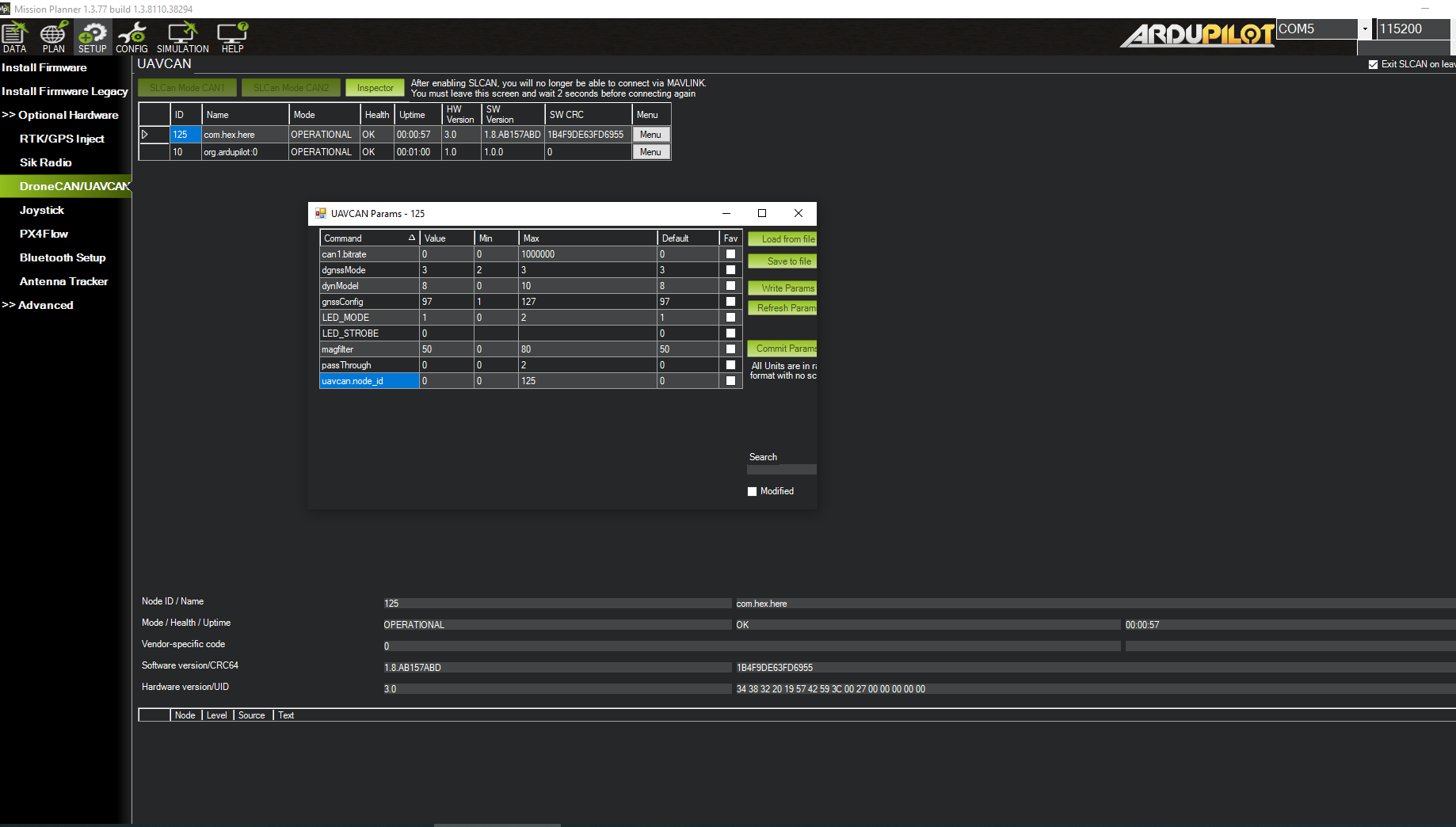
Here3 updated to version 1.8.
*eliminated induced voltage noise as a possible cause
*confirmed no wires are damaged
*firmware updated to latest (v1.8)
*900mhz radio (RFD900) antennas moved and reduced, no change
*compass confirmed to be accurate
*Set BRD_BOOT_DELAY to 5000, no change
*disconnected all peripheral components, connected direct to cube orange, no change
*force arming results in Unhealthy GPS Signal warning
*moved Here3 connector to CAN2 port, did not change parameters, no change
*connected main battery and did a full system bootup to the drone airframe, no change
*connecting a Here2 module with no parameter changes and the autopilot sees up to 16 out of 26 possible satellites with Hdop around .76 to .91. Again, I should be locking at least 18 under these conditions.
*Updated the U blox m8p chipset with the “rover” version of the firmware from U Blox company to version Flash firmware version FW 3.05 HPG 1.43 for NEO-M8P, rover
Initial install went fine, but could only track a max of 11 satellites. I’m used to getting 18-21. As of now though, I can’t get a single satellite. I’ve tried outdoors, I’ve moved radio frequency generators (antennas, radios etc.) and still no joy. I’ve followed the Here3 manual to the letter. I installed version 1.8 on it from version 1.0.
The compass works and is calibrated. Here3 is connected to CAN1 port, no damage to wires that I can tell. The attached param file is NOT the completed configuration as this is a work in progress.
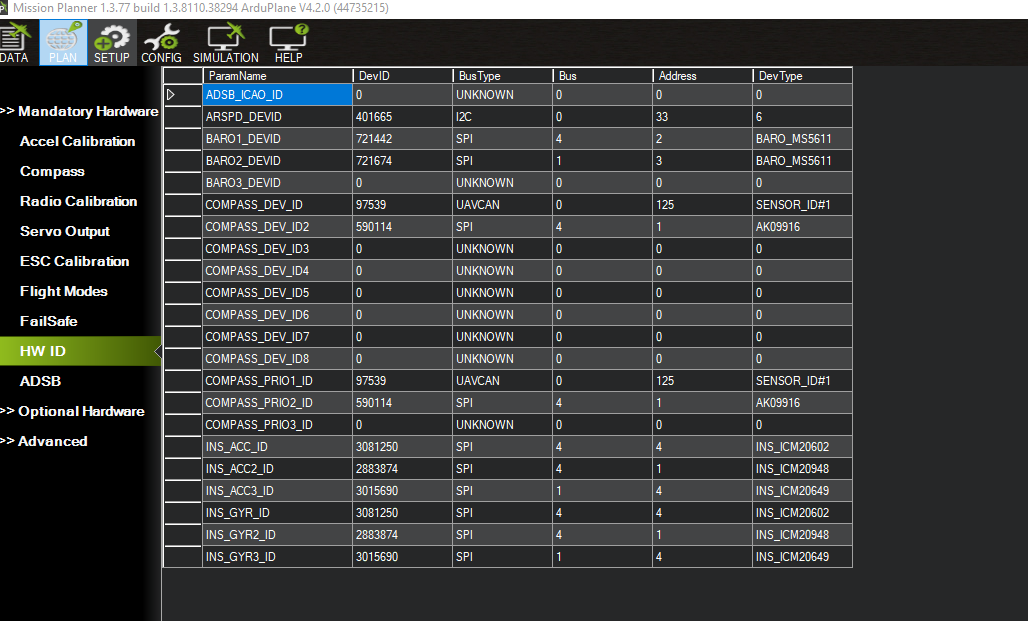
Does the MissionPlanner hardware ID screen indicate a connected GPS?
Try BRD_BOOT_DELAY,5000 to allow the GPS time to boot before the flight controller.
New result, I disconnected the Here3 and instead hooked up an old Here2 to the GPS1 port. I get satellites but again, not what I typically should get. I am seeing 11 to 16 with hdop around .7-.9 when I should be able to have up to 26 (27 satellites are visible at this moment).
So, same thing that happened with the Here3, poor satellite detection for awhile and I’ll bet the Here2 will eventually not detect any.
The Here2 is factory set/defaulted/not modified/not updated.
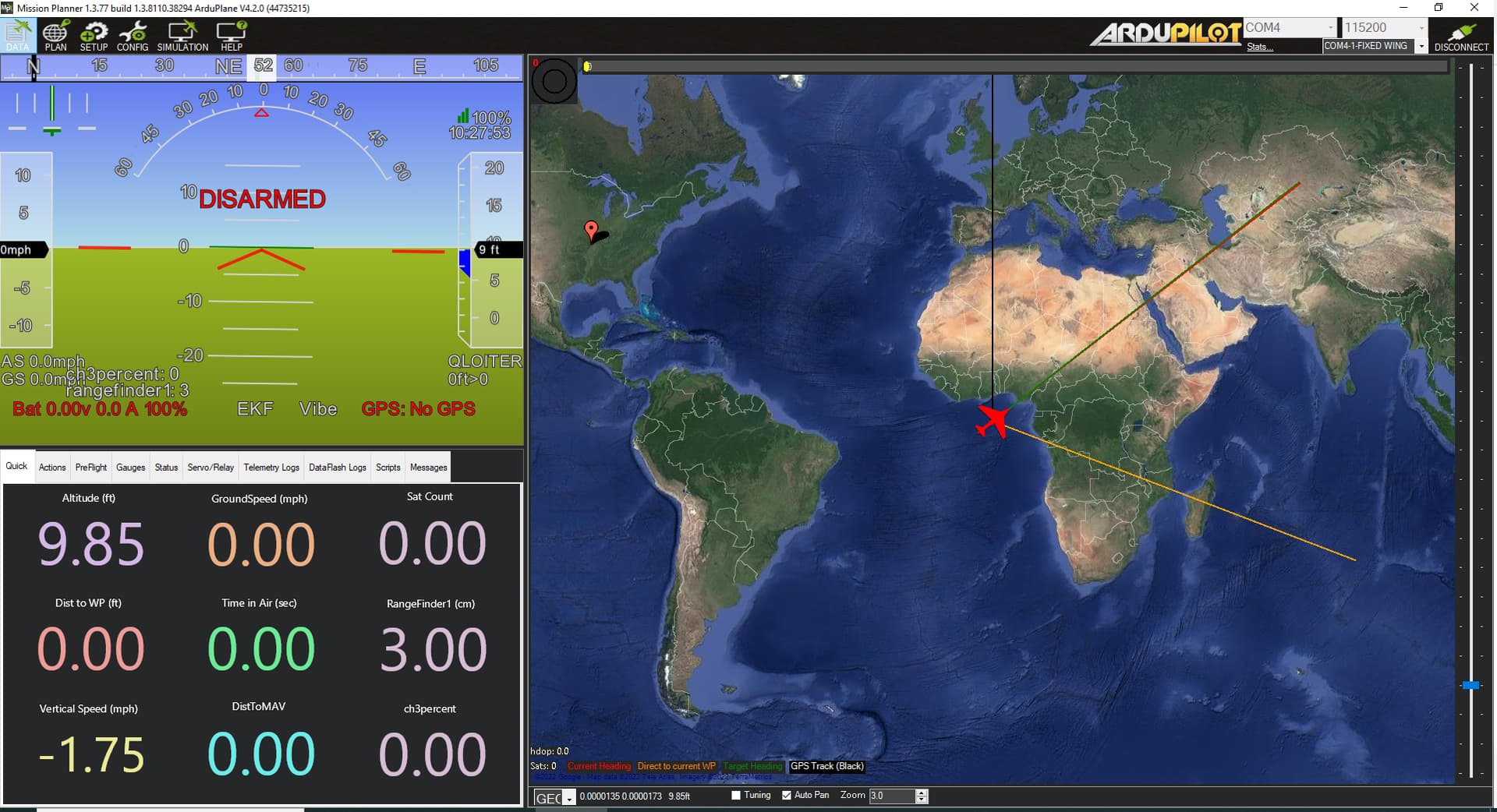
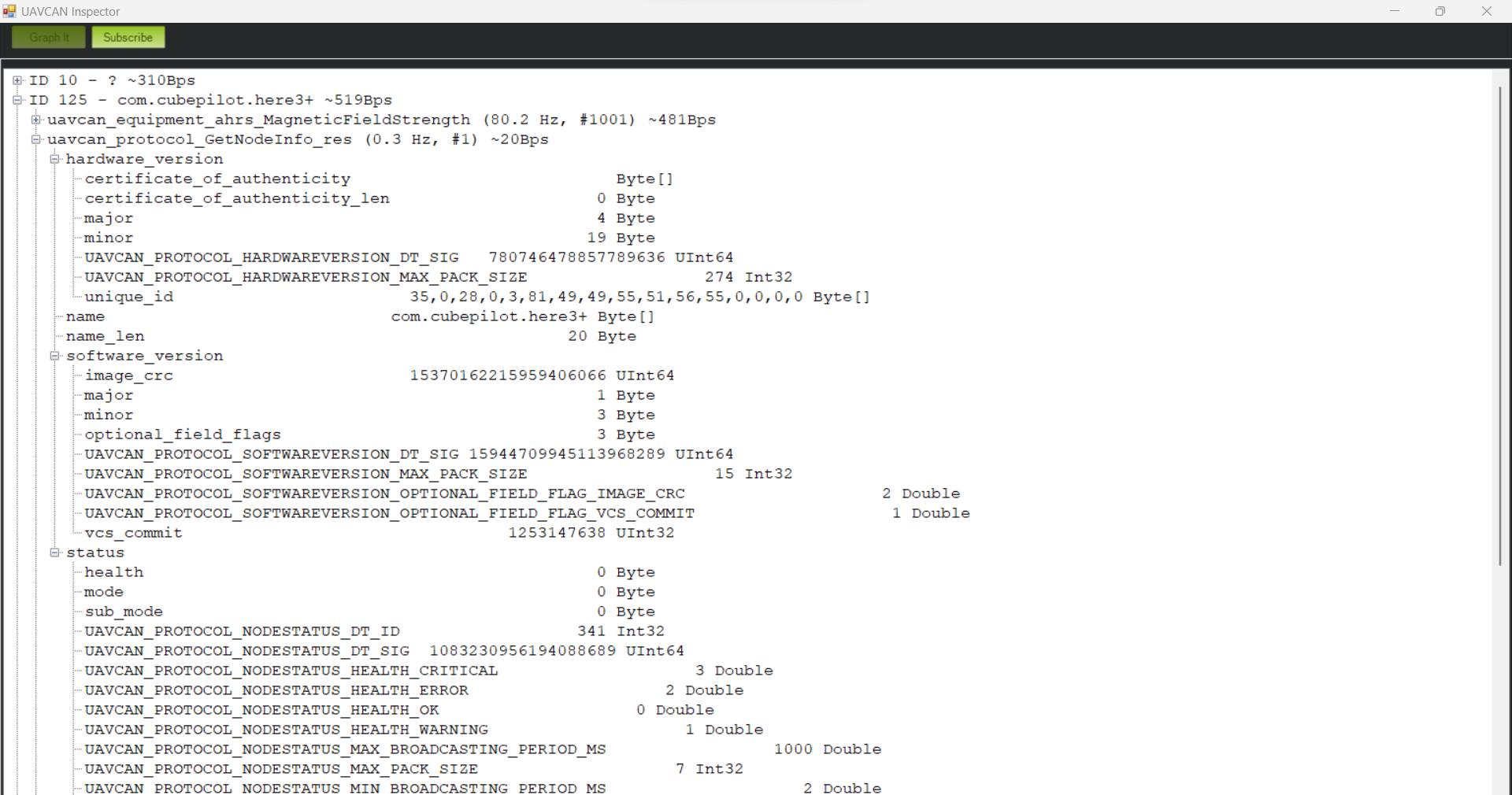
So how can my Here3 be getting all of this information yet Mission Planner fails to report a GPS fix?? On top of this, I am only getting GPS and GLONASS constellations and not Beidou!
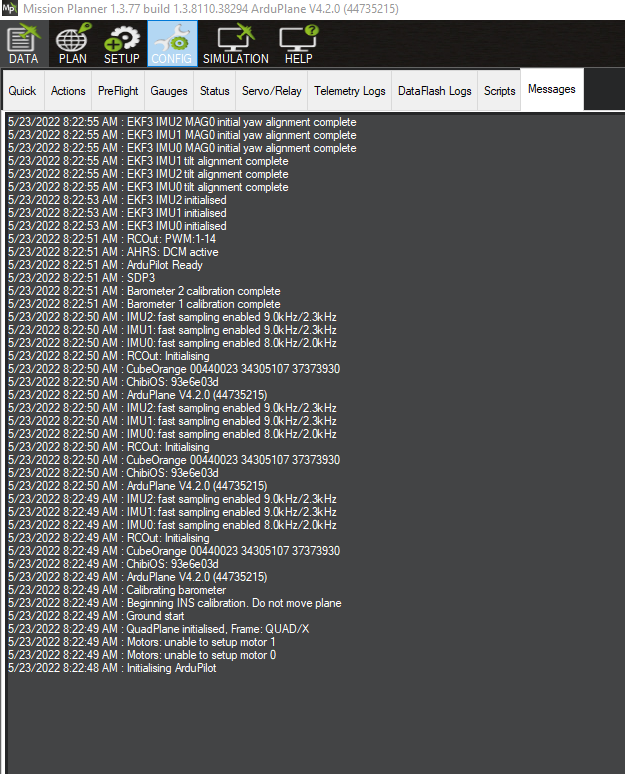
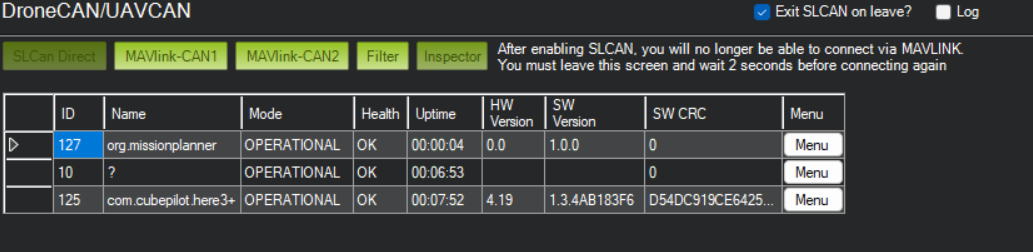
At these startup messages I was hoping to see the message “GPS specified as …”, so it shows that the device is being found by ardupilot during startup, but right now I am in doubt if this message is Copter vehicle specific, never used Arduplane so I could be wrong about it, it is strange that the UAVCAN screen on MP shows the device.
I have a Here3+ RTK GPS and Pixhawk Cube Orange. When I first set up I did what Here3+ manual says, there was a no-fix warning and double blinking yellow led, then I changed the NFT_LED parameter and updated the GPS I think and my GPS is not working right now. The compass is working correctly but there is No GPS. I checked the status of Here3+ and there was no sign of GPS. I reset parameters a lot of times and changed the can port but didn’t work. There is still double blinking yellow light, but no GPS. I checked the Can ports voltages, and it seems fine.
This problem was one that I never did figure out specifically what it was. Go through this checklist:
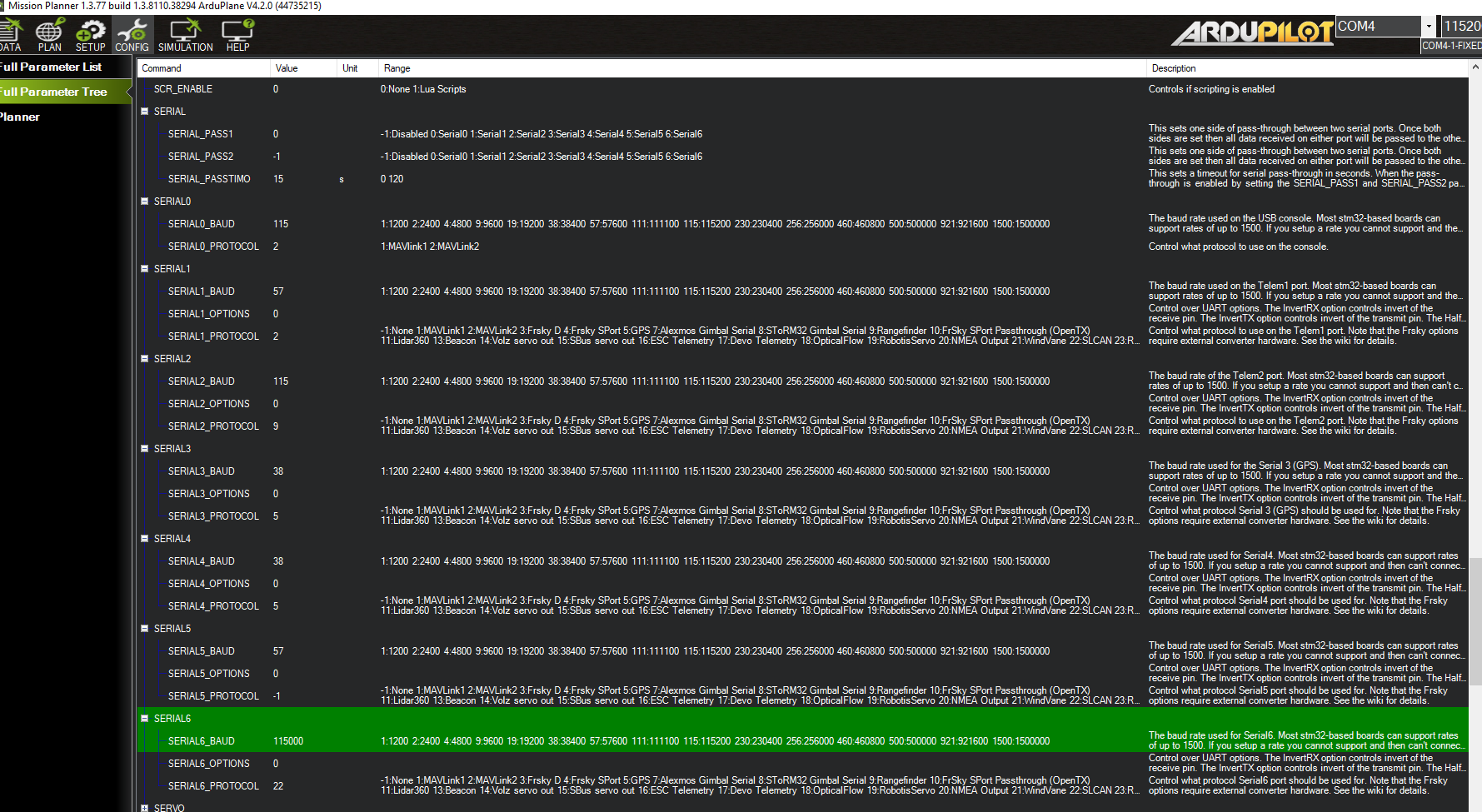
Ensure your serial parameters are set for gps use
check for loose or broken wires
if the NFT_LED parameter is not set right there will be NO lights, otherwise it should be good
I solved mine by doing a factory reset which put the GPS params back in “order” for me
Put the GPS outside as inside has the potential to 100% block signal or it can take tens of minutes to collect enough of a signal to plot itself on a map, outside takes like 1 minute max
check to see if you have any other wires near the GPS wire, specifically anything that can generate a magnetic field of sufficient strength to cause interference with the gps signal going to the autopilot (not likely the problem)
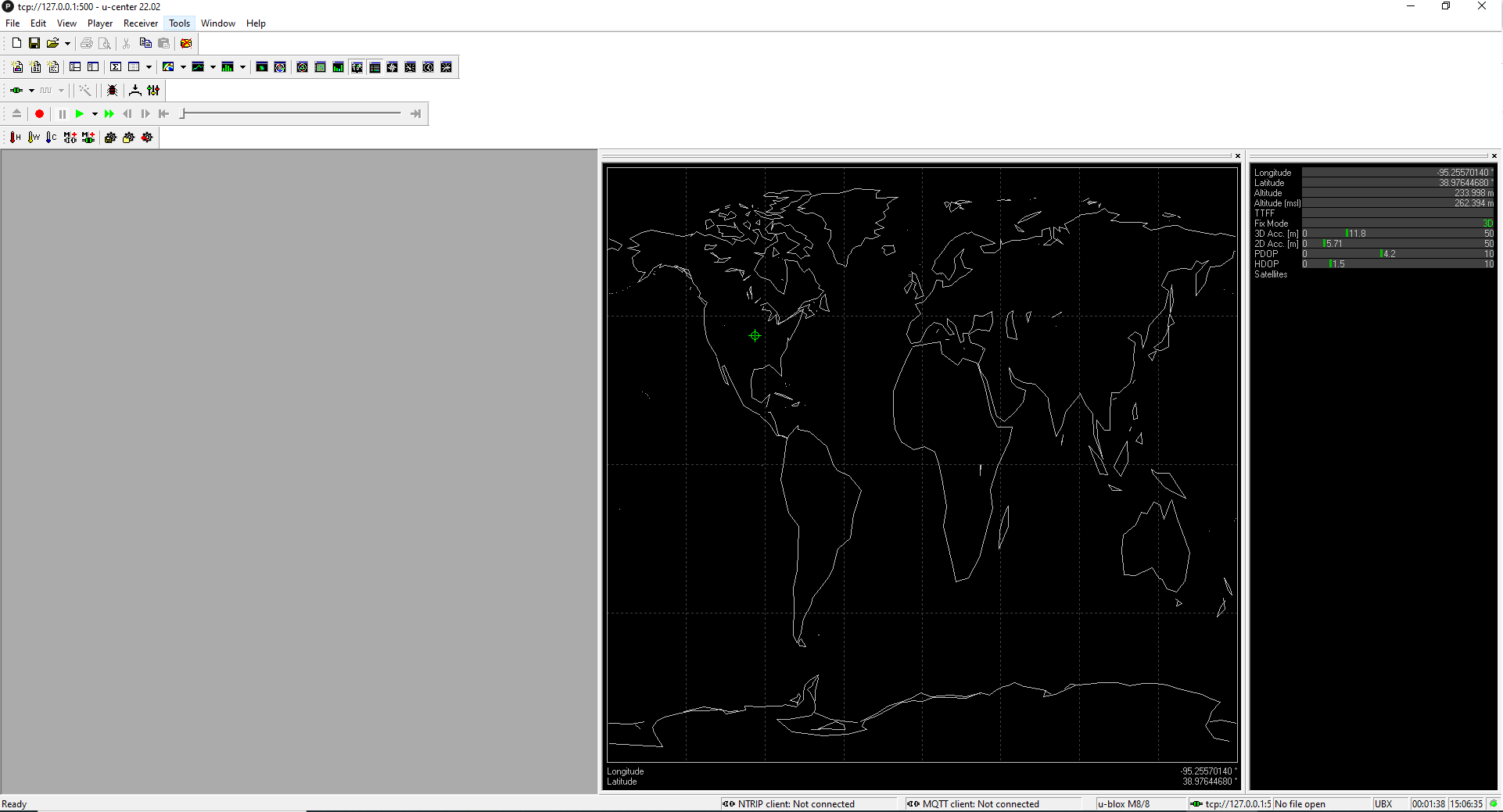
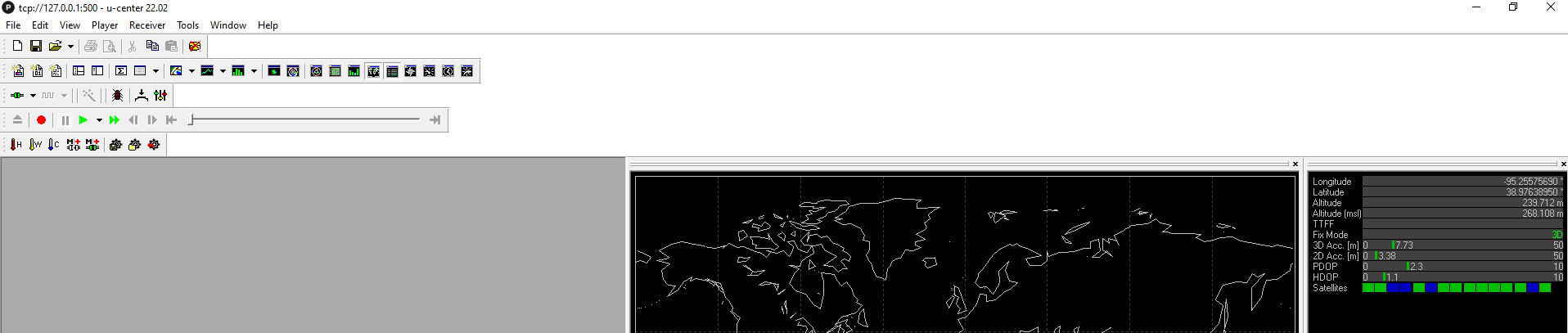
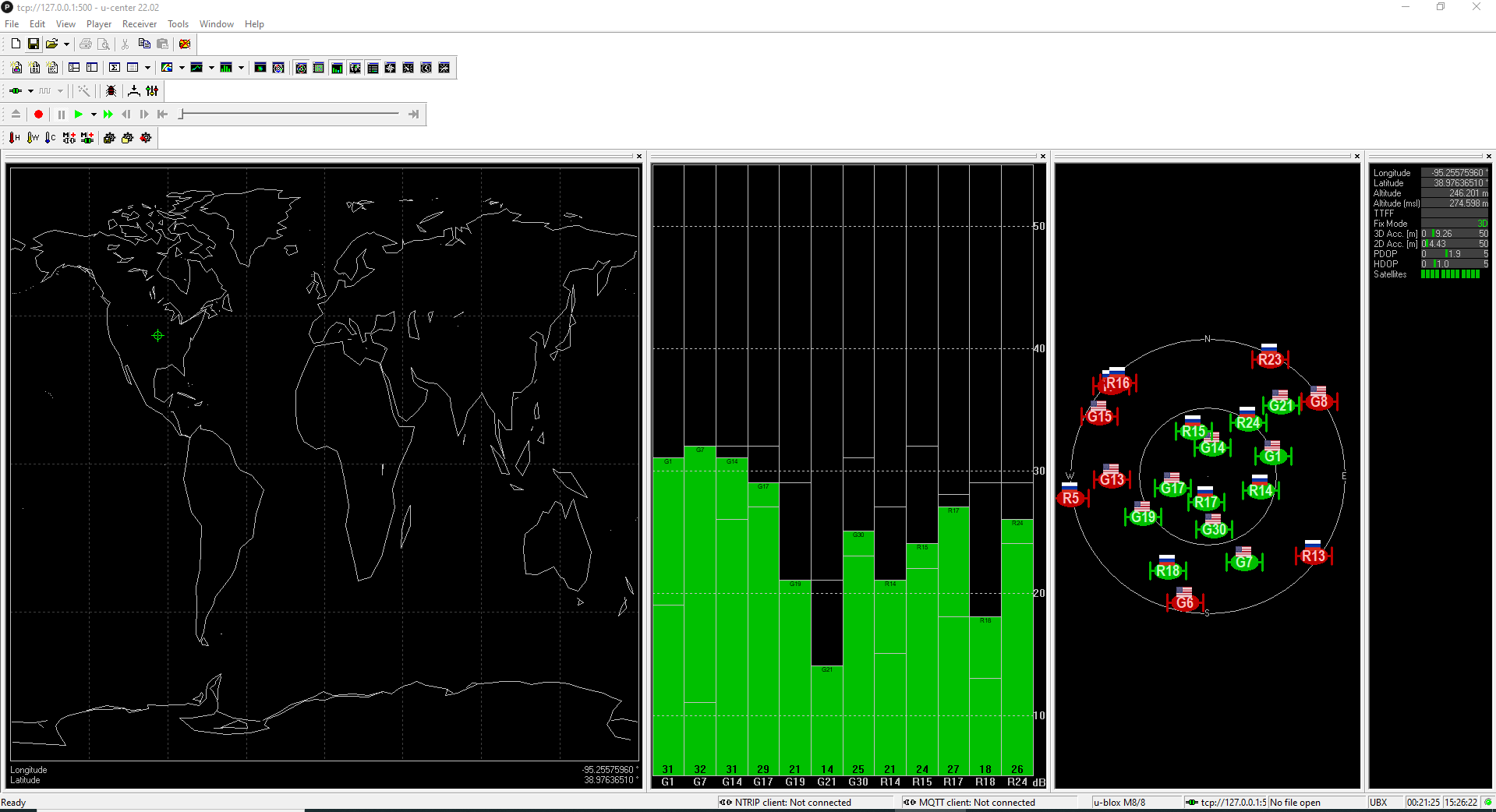
Download and use the U-center program from the guys here: NEO-M8P series Follow the docs, it’s not long or hard to do it and if you can get the satellites to show up there then you’ll know for sure it’s a parameter setting on the autopilot itself!
My problem occurred because I messed up a parameter setting, try that angle as you debug this sucker!
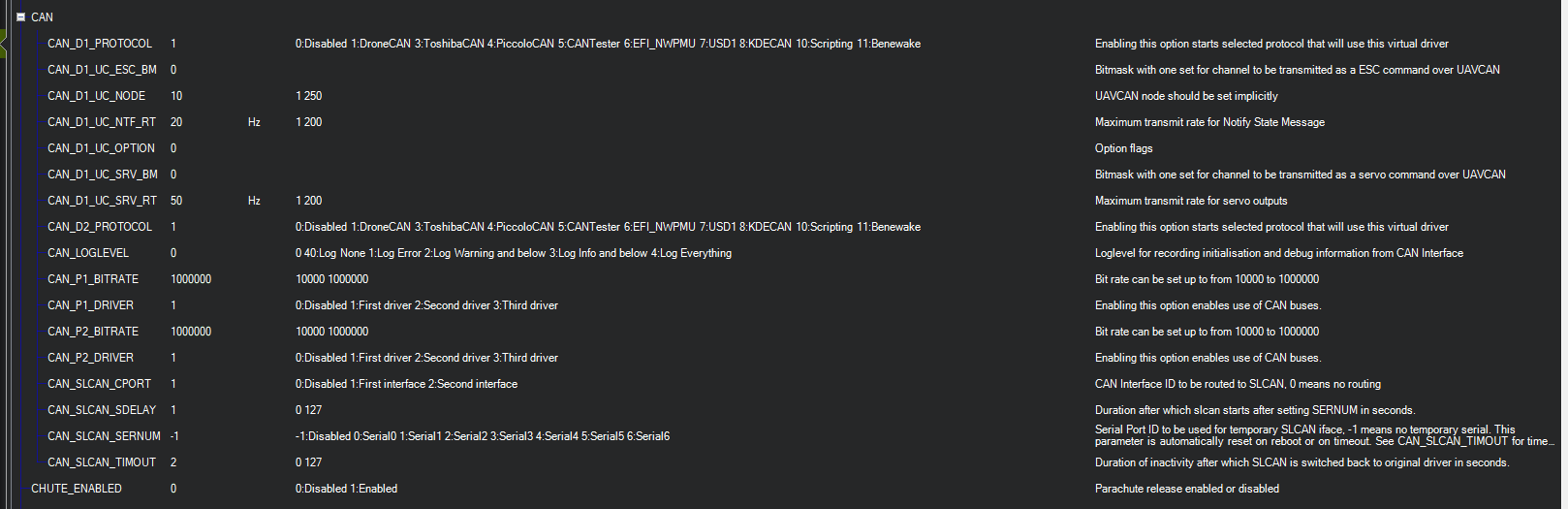
Set BRD_BOOT_DELAY,3000 which allows some time for CAN devices to boot and be ready before the flight controller boots and starts interrogating devices and addresses.
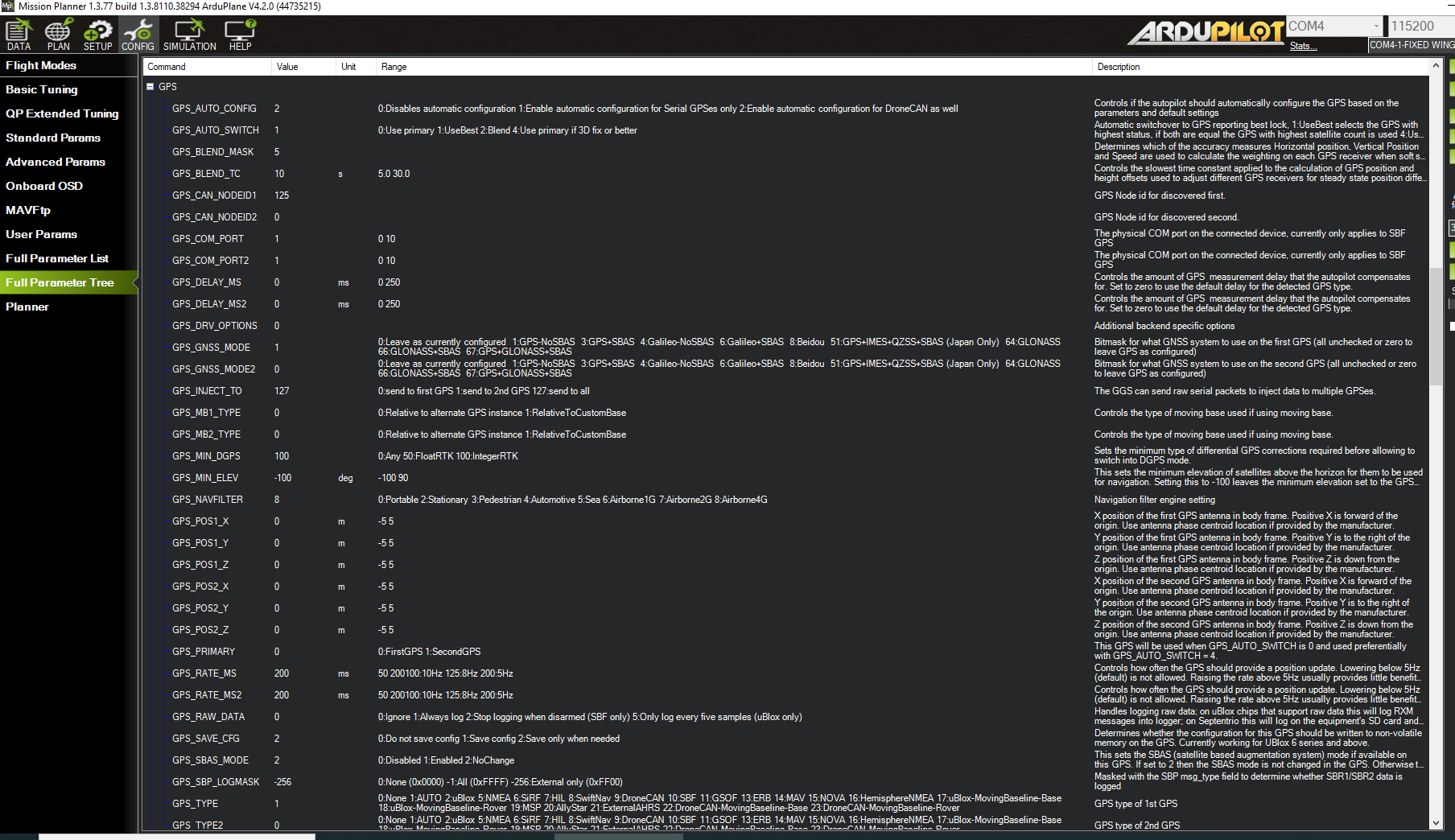
Also unplug any additional GPS device until you get this working. In the GPS_ parameters
GPS1 equates to the first GPS unit found searching through serial ports that have SERIALx_PROTOCOL,5
GPS2 equates to the second GPS unit found…
So GPS1 and GPS2 params DO NOT necessarily equate to the markings on the outside of the flight controller such as the “GPS1” port and “GPS2” port
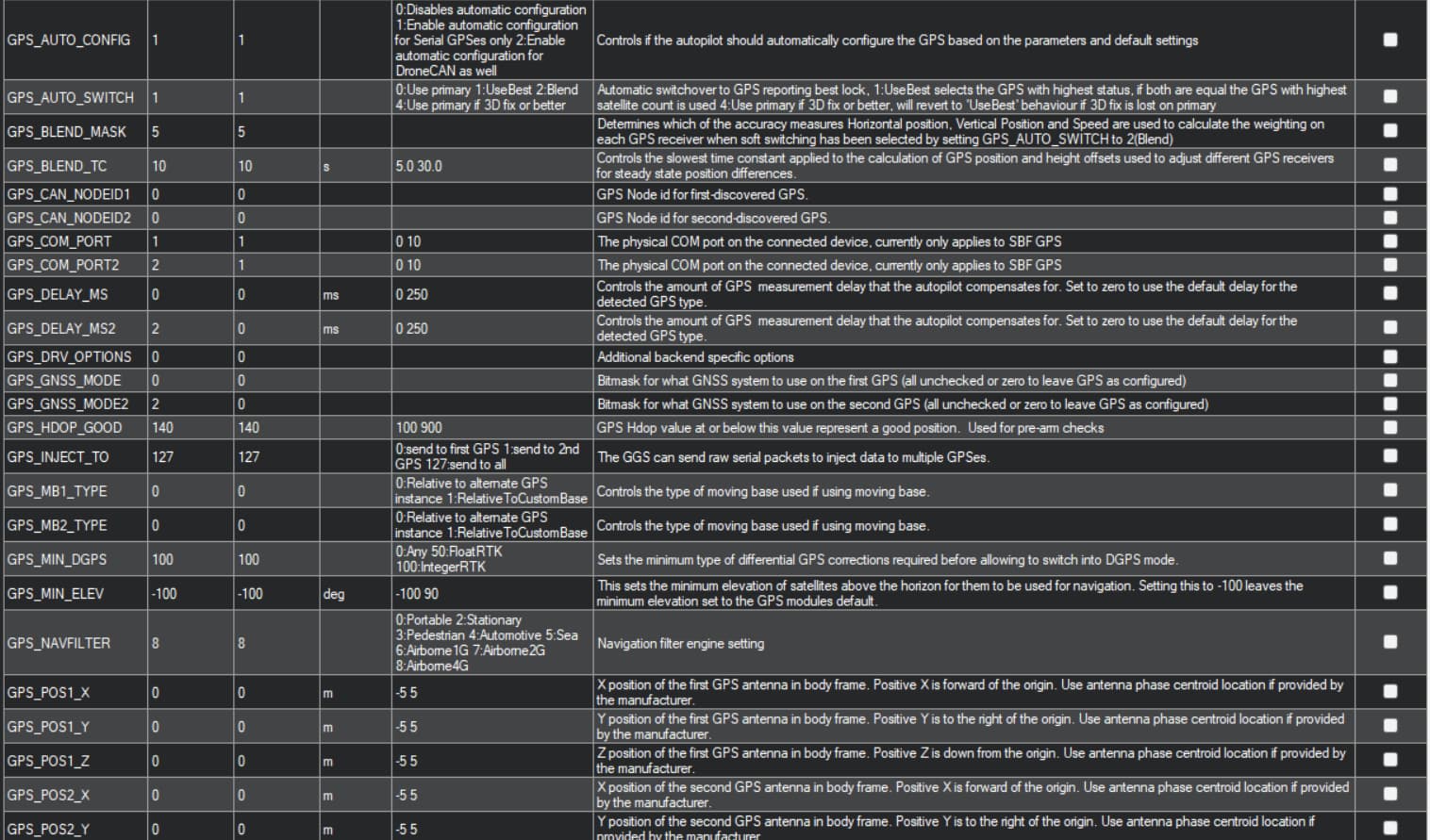
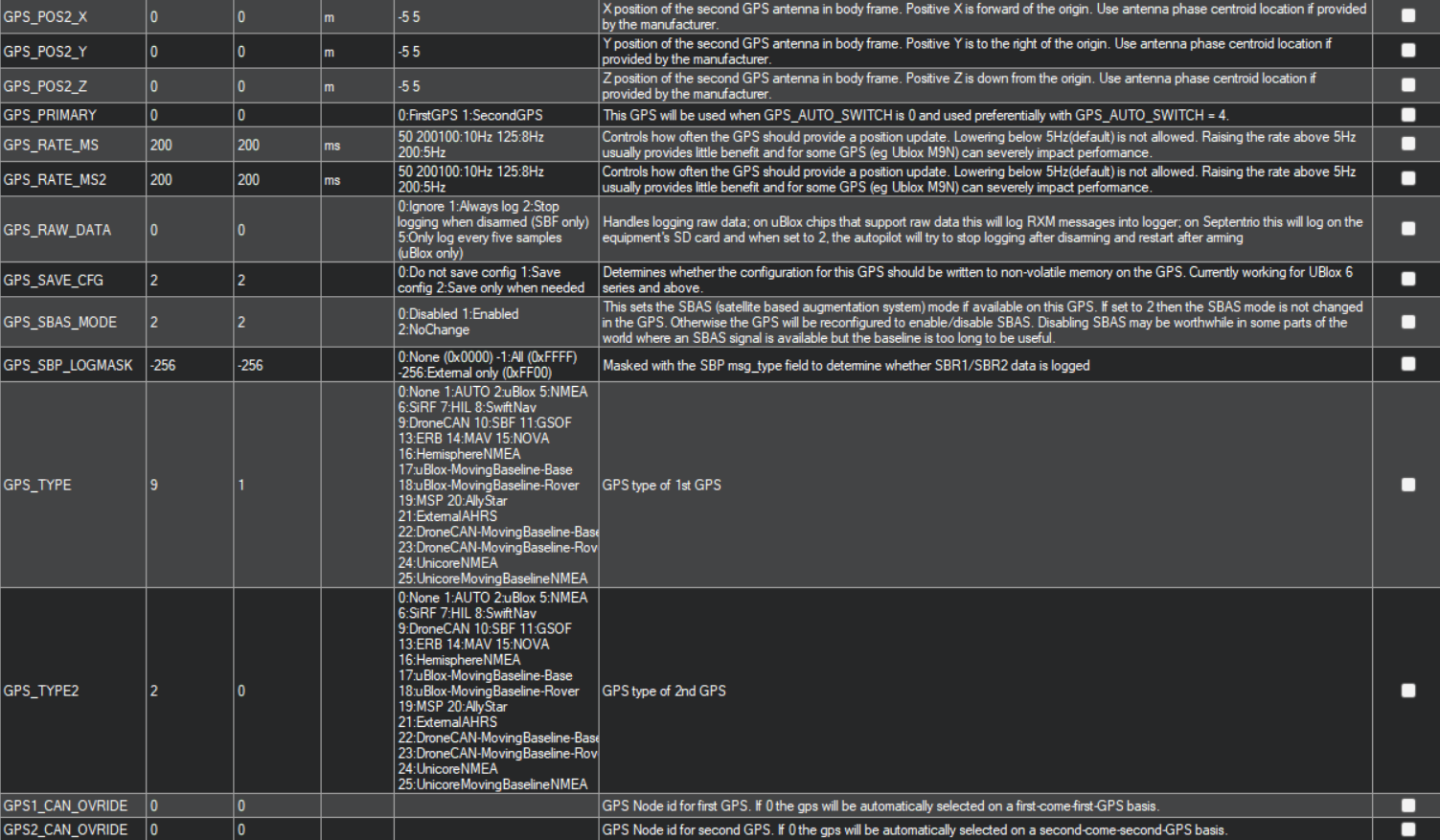
So I think you would solve your issue by switching the GPS_TYPE params around to:
GPS_TYPE,2
GPS_TYPE2,9
To be sure we would need to see your param file (you can save the params to file without doing a bunch of screenshots)
or a .bin log file, you would just have to set LOG_DISARMED,1 to generate a log file, then set it back to 0
I’ll try through this checklist and I’ll share the results. But there are some parts that you mentioned and I do not know how to do. Can you explain it more detailed?
-Which serial parameters are about serial settings?
-How can I factory reset the GPS module?