I solved the question. Below is an example project. The project can be considered as GPIO example.
//
// Simple test for GPIO reading signals.
//
#include <AP_HAL/AP_HAL.h>
#include <AP_BoardConfig/AP_BoardConfig.h>
//#include <AP_HAL/AP_GPIO.h>
// board specific config
AP_BoardConfig BoardConfig;
const AP_HAL::HAL &hal = AP_HAL::get_HAL();
#define my_pin 50
void setup(void);
void loop(void);
void setup(void)
{
BoardConfig.init();
hal.gpio->pinMode ( my_pin , HAL_GPIO_INPUT ) ;
hal.gpio->init() ;
}
void loop(void)
{
static int count = 0 ;
// wait for user input
while (!hal.console->available()) {
hal.scheduler->delay(20);
}
hal.gpio->toggle(my_pin) ;
uint8_t status = hal.gpio->read(my_pin) ;
hal.console->printf("hal.gpio[%2d] - %d \t\t count - %5d \n", my_pin, status, count++) ;
hal.scheduler->delay(1000);
}
AP_HAL_MAIN();
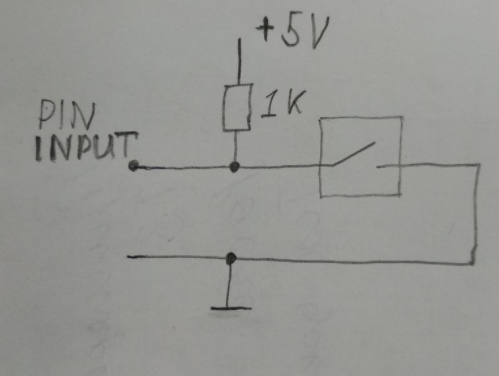
Hello everybody. I set up the spray system on pixhawk. now I want to integrate the water level sensor. The sensor outputs either 0 or 5V. I want to read the values through the AUX channel, but I do not understand how to do this.
Using examples from the libraries folder and the AP_Relay library, I learned how to program the feet of aux as output and send signals to them. Now I’m working with input signals.
I found a suitable AP_Buttons library and made the following settings: In the AP_Button.cpp file I made the presets in the var_info array to include the feet of AUX1-4. Then added the “get_button_status” method to read the mask changes.
That’s what all the code looks like.
AP_Button.h file
#include <AP_HAL/AP_HAL.h>
#include <AP_Param/AP_Param.h>
// allow buttons for up to 4 pins
#define AP_BUTTON_NUM_PINS 4
// how often we send reports
#define AP_BUTTON_REPORT_PERIOD_MS 1000
class AP_Button {
public:
// constructor
AP_Button(void);
static const struct AP_Param::GroupInfo var_info[];
// update button state and send messages, called periodically by main loop
void update(void);
// MY NEW METOD TO READ MASK
// return status of current button
bool get_button_status ( uint8_t button ) ;
private:
AP_Int8 enable;
AP_Int8 pin[AP_BUTTON_NUM_PINS];
// number of seconds to send change notifications
AP_Int16 report_send_time;
// last button press mask
uint8_t last_mask;
// when the mask last changed
uint64_t last_change_time_ms;
// time of last report
uint32_t last_report_ms;
// has the timer been installed?
bool initialised:1;
// called by timer thread
void timer_update(void);
// get current mask
uint8_t get_mask(void);
// send a BUTTON_CHANGE report
void send_report(void);
// setup pins as pullup input
void setup_pins();
};
AP_Button.cpp file.
#include "AA_Button.h"
#include <GCS_MAVLink/GCS_MAVLink.h>
#include <GCS_MAVLink/GCS.h>
extern const AP_HAL::HAL& hal;
const AP_Param::GroupInfo AP_Button::var_info[] = {
// @Param: ENABLE
// @DisplayName: Enable button reporting
// @Description: This enables the button checking module. When this is disabled the parameters for setting button inputs are not visible
// @Values: 0:Disabled, 1:Enabled
// @User: Advanced
AP_GROUPINFO_FLAGS("ENABLE", 0, AP_Button, enable, 0, AP_PARAM_FLAG_ENABLE),
// @Param: PIN1
// @DisplayName: First button Pin
// @Description: Digital pin number for first button input.
// @User: Standard
// @Values: -1:Disabled,50:Pixhawk AUXOUT1,51:Pixhawk AUXOUT2,52:Pixhawk AUXOUT3,53:Pixhawk AUXOUT4,54:Pixhawk AUXOUT5,55:Pixhawk AUXOUT6,111:PX4 FMU Relay1,112:PX4 FMU Relay2,113:PX4IO Relay1,114:PX4IO Relay2,115:PX4IO ACC1,116:PX4IO ACC2
//AP_GROUPINFO("PIN1", 1, AP_Button, pin[0], -1),
// MY CHANGES
AP_GROUPINFO( "PIN1", 1, AP_Button, pin[0], 51 ), // 51 - pixhawk AUXOUT2 INPUT
// @Param: PIN2
// @DisplayName: Second button Pin
// @Description: Digital pin number for second button input.
// @User: Standard
// @Values: -1:Disabled,50:Pixhawk AUXOUT1,51:Pixhawk AUXOUT2,52:Pixhawk AUXOUT3,53:Pixhawk AUXOUT4,54:Pixhawk AUXOUT5,55:Pixhawk AUXOUT6,111:PX4 FMU Relay1,112:PX4 FMU Relay2,113:PX4IO Relay1,114:PX4IO Relay2,115:PX4IO ACC1,116:PX4IO ACC2
//AP_GROUPINFO("PIN2", 2, AP_Button, pin[1], -1),
AP_GROUPINFO( "PIN2", 2, AP_Button, pin[1], 52 ), // 52 - pixhawk AUXOUT3 INPUT
// @Param: PIN3
// @DisplayName: Third button Pin
// @Description: Digital pin number for third button input.
// @User: Standard
// @Values: -1:Disabled,50:Pixhawk AUXOUT1,51:Pixhawk AUXOUT2,52:Pixhawk AUXOUT3,53:Pixhawk AUXOUT4,54:Pixhawk AUXOUT5,55:Pixhawk AUXOUT6,111:PX4 FMU Relay1,112:PX4 FMU Relay2,113:PX4IO Relay1,114:PX4IO Relay2,115:PX4IO ACC1,116:PX4IO ACC2
AP_GROUPINFO("PIN3", 3, AP_Button, pin[2], -1),
// @Param: PIN4
// @DisplayName: Fourth button Pin
// @Description: Digital pin number for fourth button input.
// @User: Standard
// @Values: -1:Disabled,50:Pixhawk AUXOUT1,51:Pixhawk AUXOUT2,52:Pixhawk AUXOUT3,53:Pixhawk AUXOUT4,54:Pixhawk AUXOUT5,55:Pixhawk AUXOUT6,111:PX4 FMU Relay1,112:PX4 FMU Relay2,113:PX4IO Relay1,114:PX4IO Relay2,115:PX4IO ACC1,116:PX4IO ACC2
AP_GROUPINFO("PIN4", 4, AP_Button, pin[3], -1),
// @Param: REPORT_SEND
// @DisplayName: Report send time
// @Description: The duration in seconds that a BUTTON_CHANGE report is repeatedly sent to the GCS regarding a button changing state. Note that the BUTTON_CHANGE message is MAVLink2 only.
// @User: Standard
// @Range: 0 3600
AP_GROUPINFO("REPORT_SEND", 5, AP_Button, report_send_time, 10),
AP_GROUPEND
};
// constructor
AP_Button::AP_Button(void)
{
AP_Param::setup_object_defaults(this, var_info);
}
/*
update and report, called from main loop
*/
void AP_Button::update(void)
{
if (!enable) {
return;
}
// call setup pins at update rate (5Hz) to allow for runtime parameter change of pins
setup_pins();
if (!initialised) {
initialised = true;
// get initial mask
last_mask = get_mask();
// register 1kHz timer callback
hal.scheduler->register_timer_process(FUNCTOR_BIND_MEMBER(&AP_Button::timer_update, void));
}
if (last_change_time_ms != 0 &&
(AP_HAL::millis() - last_report_ms) > AP_BUTTON_REPORT_PERIOD_MS &&
(AP_HAL::millis64() - last_change_time_ms) < report_send_time*1000ULL) {
// send a change report
last_report_ms = AP_HAL::millis();
// send a report to GCS
send_report();
}
}
/*
get current mask
*/
uint8_t AP_Button::get_mask(void)
{
uint8_t mask = 0;
for (uint8_t i=0; i<AP_BUTTON_NUM_PINS; i++) {
if (pin[i] == -1) {
continue;
}
mask |= hal.gpio->read(pin[i]) << i;
}
return mask;
}
/*
called at 1kHz to check for button state change
*/
void AP_Button::timer_update(void)
{
if (!enable) {
return;
}
uint8_t mask = get_mask();
if (mask != last_mask) {
last_mask = mask;
last_change_time_ms = AP_HAL::millis64();
}
}
/*
send a BUTTON_CHANGE report to the GCS
*/
void AP_Button::send_report(void)
{
uint8_t chan_mask = GCS_MAVLINK::active_channel_mask();
uint32_t now = AP_HAL::millis();
for (uint8_t i=0; i<MAVLINK_COMM_NUM_BUFFERS; i++) {
if ((chan_mask & (1U<<i)) == 0) {
// not active
continue;
}
mavlink_channel_t chan = (mavlink_channel_t)i;
if (HAVE_PAYLOAD_SPACE(chan, BUTTON_CHANGE)) {
mavlink_msg_button_change_send(chan,
now,
(uint32_t)last_change_time_ms,
last_mask);
}
}
}
/*
setup the pins as input with pullup. We need pullup to give reliable
input with a pulldown button
*/
void AP_Button::setup_pins(void)
{
for (uint8_t i=0; i<AP_BUTTON_NUM_PINS; i++) {
if (pin[i] == -1) {
continue;
}
hal.gpio->pinMode(pin[i], HAL_GPIO_INPUT);
// setup pullup
hal.gpio->write(pin[i], 1);
}
}
// MY NEW METOD TO READ MASK
// return status of conkretic button.
// buttons number: 1-4
bool AP_Button::get_button_status ( uint8_t button )
{
uint8_t mask = get_mask();
// last_mask - status of all buttons
if (mask & ( 0b1 << button ) ){
return true ;
}
return false ;
}
MAIN file
//
// Simple test for the AP_InertialSensor driver.
//
#include <AP_HAL/AP_HAL.h>
#include <AP_BoardConfig/AP_BoardConfig.h>
#include <AP_InertialSensor/AP_InertialSensor.h>
#include <stdio.h>
#include <AP_Button/AP_Button.h>
const AP_HAL::HAL &hal = AP_HAL::get_HAL();
AP_InertialSensor ins;
// board specific config
AP_BoardConfig BoardConfig;
AP_Button v_button ;
void setup(void);
void loop(void);
void setup(void)
{
// setup any board specific drivers
BoardConfig.init();
// RELAY INIT
//v_relay.init() ;
ins.init(100);
v_button.update();
}
void loop(void)
{
static int count = 0 ;
int i ;
// wait for user input
while (!hal.console->available()) {
hal.scheduler->delay(20);
}
v_button.update();
hal.console->printf("%5d)Button status = ", count++);
for (i = 7; i>=0 ; i-- ){
hal.console->printf("%s", v_button.get_button_status (i) ? "1" : "0") ;
hal.scheduler->delay(10);
}
hal.console->printf("\n");
hal.scheduler->delay(1000);
}
AP_HAL_MAIN();
After uploading the project to pixhawk, I feed into the AUX2 channel of 0V or 5V, but I do not see any changes in the console.
MAV> Waiting for heartbeat from COM12
0)Button status = 00000000
1)Button status = 00000000
2)Button status = 00000000
3)Button status = 00000000
4)Button status = 00000000
5)Button status = 00000000
6)Button status = 00000000
7)Button status = 00000000
8)Button status = 00000000
9)Button status = 00000000
10)Button status = 00000000
11)Button status = 00000000
12)Button status = 00000000
13)Button status = 00000000
Be kind, direct me towards the solution of the problem.