Does anyone know how I can get the GPS track heading to the degree of the drone body heading?
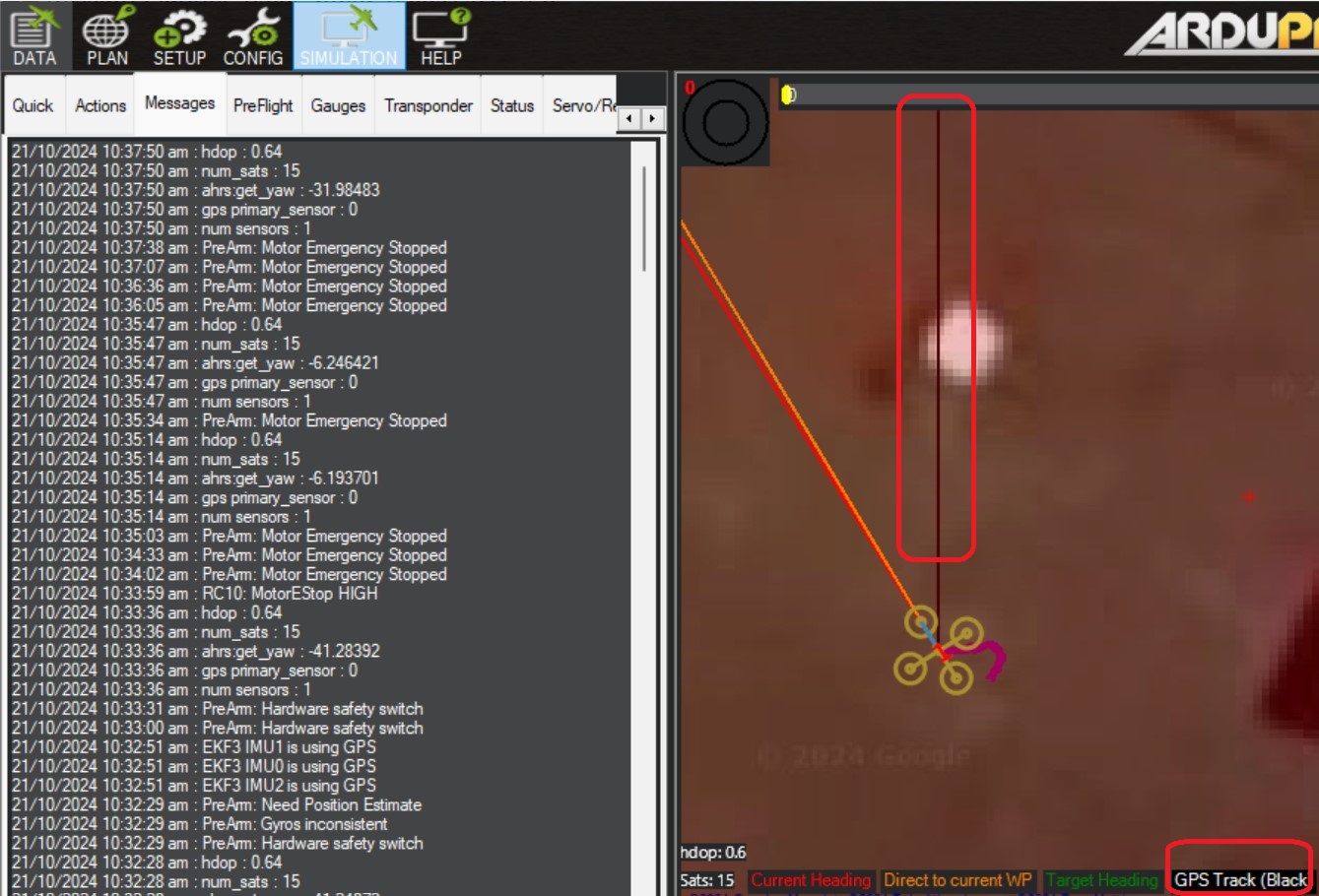
I also noticed this black line in MP keeps changing over time at the same location.
I am using this command to move the drone, but the movement direction in angle is not what I expected.
function vehicle:set_target_velocity_NED(vel_ned) end
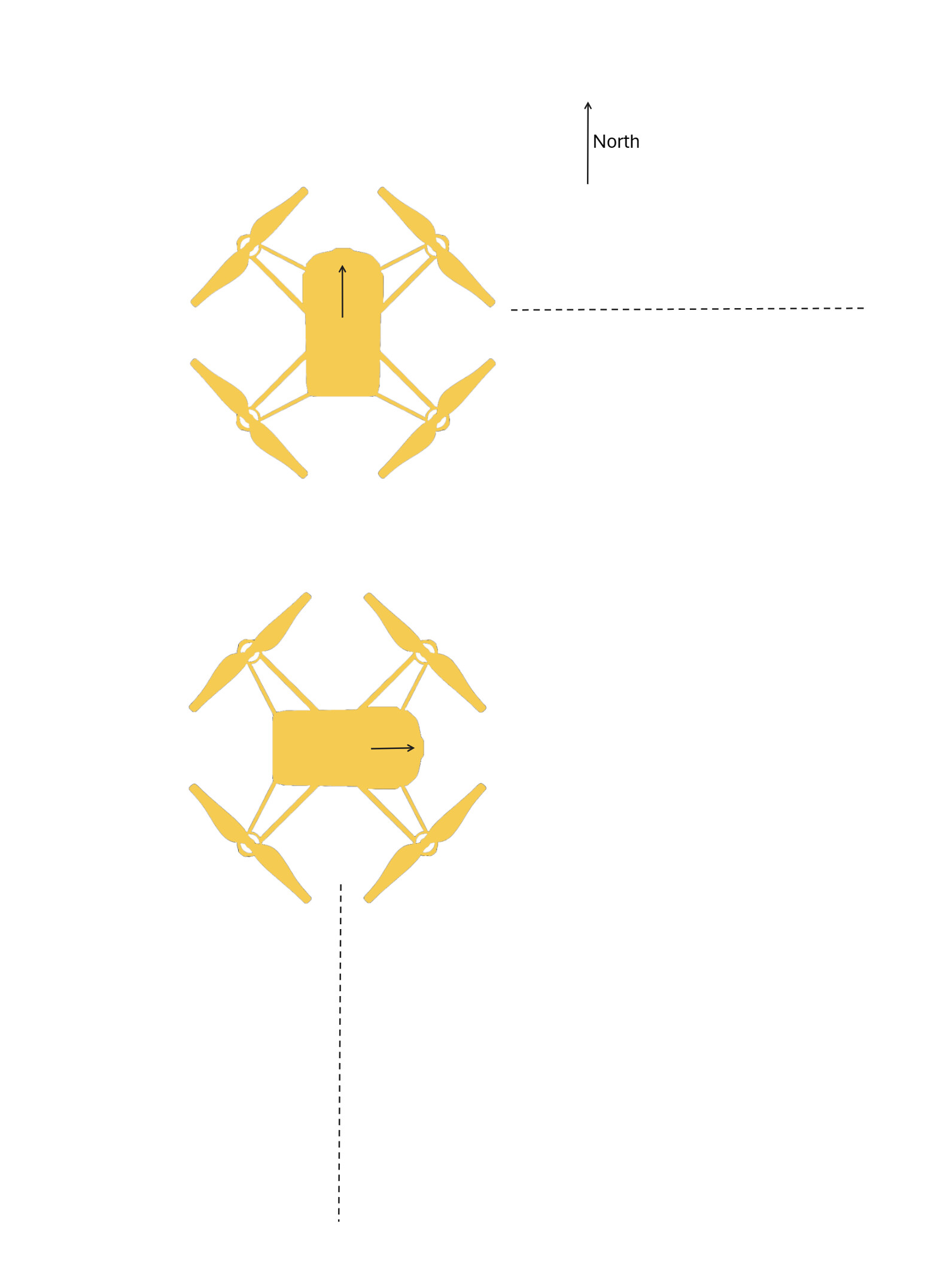
The objective I hope to achieve is shown in the picture below.
yaw_cos = math.cos(g_yaw_rad) -- ahrs:get_yaw()
yaw_sin = math.sin(g_yaw_rad)
vel_X = vel * yaw_cos - vel * yaw_sin
vel_Y = vel * yaw_sin + vel * yaw_cos
local target_vel = Vector3f()
target_vel:x(vel_X)
target_vel:y(vel_Y)
target_vel:z(0)
vehicle:set_target_velocity_NED(target_vel)
Is it I need to upgrade the drone to 4.5.5 and above and use gps:gps_yaw_deg?
function gps:gps_yaw_deg(instance) end
function ahrs:get_yaw() end
What you looking for is the gps ground course (the black line represents that in MP). Use gps:ground_course(instance) in LUA. But this is simply calculated from two consecutive position readings. So it is not “valid” while the vehicle is stationary.
These two borrowed formulas are not ideal in my case. Problem solved.
ahrs:get_yaw() return is with reference to the Earth frame. No other Lua API needed for the new formula.
I notice the problem when I was unable to get these values from the old formula regardless of the angle I input.