How the “set_target_velocity_NED” function works, I switch to GUIDED mode, but the plane just circles in one place, I would also like to know how “set_target_location” works, when I set longitude and latitude coordinates, my plane just circles around the target point gradually losing altitude, i tried to specify the height by coordinates, but it doesn’t work
I would also like to understand this. Any updates on this?
No, I haven’t found a solution yet.
I am using the following Lua script API to fly the drone.
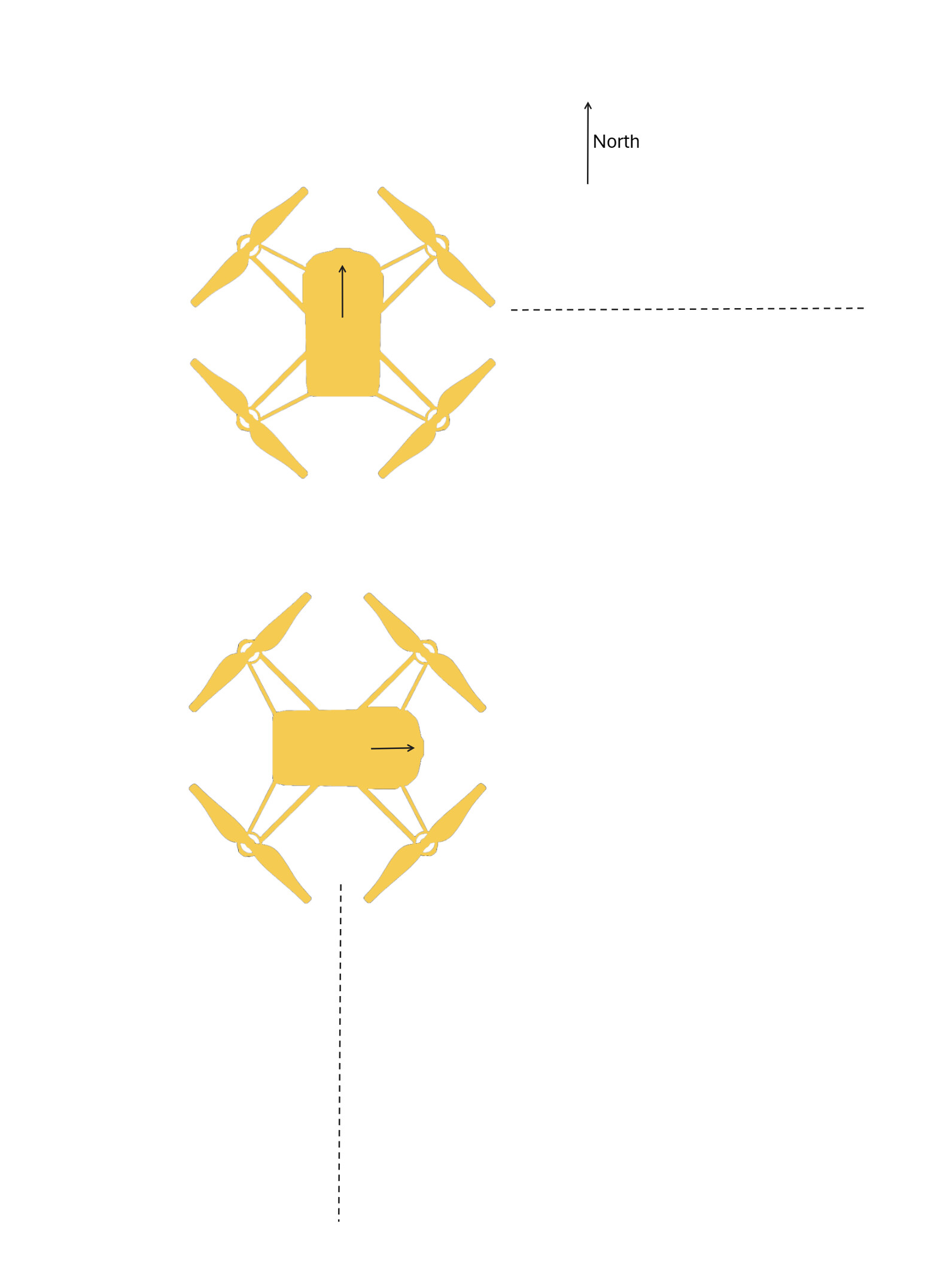
Is WP_YAW_BEHAVIOR,0 good enough for the user to place the drone in any heading and achieve the right direction movement?
If not, what other Lua script API must I include to achieve that?
How do I use the Mission Planner Simulator to verify that?
@class (exact) Vector3f_ud
vehicle = {}
WP_YAW_BEHAVIOR,0 # Never Change yaw
# simplfy the code
local target_vel = Vector3f()
target_vel:x(0)
target_vel:y(1)
target_vel:z(0)
vehicle:set_target_velocity_NED(target_vel)
I managed to partially solve it after I found this example and modify to suit my case, keeping WP_YAW_BEHAVIOR,0.
I also managed to use the Simulator to verify my code enhancement before I crashed the drone when I executed it in the real world.