Hey there,
We took-off on our second flying session for PID tuning of our system.
The drone is a rotated H-frame (meaning the cross-arm is crossing left-right rather than front-back), hence the motor configuration is X-type quad.
After a couple of flights, the drone performed a strange movement and plummeted to the grass, braking a carbon fiber arm.
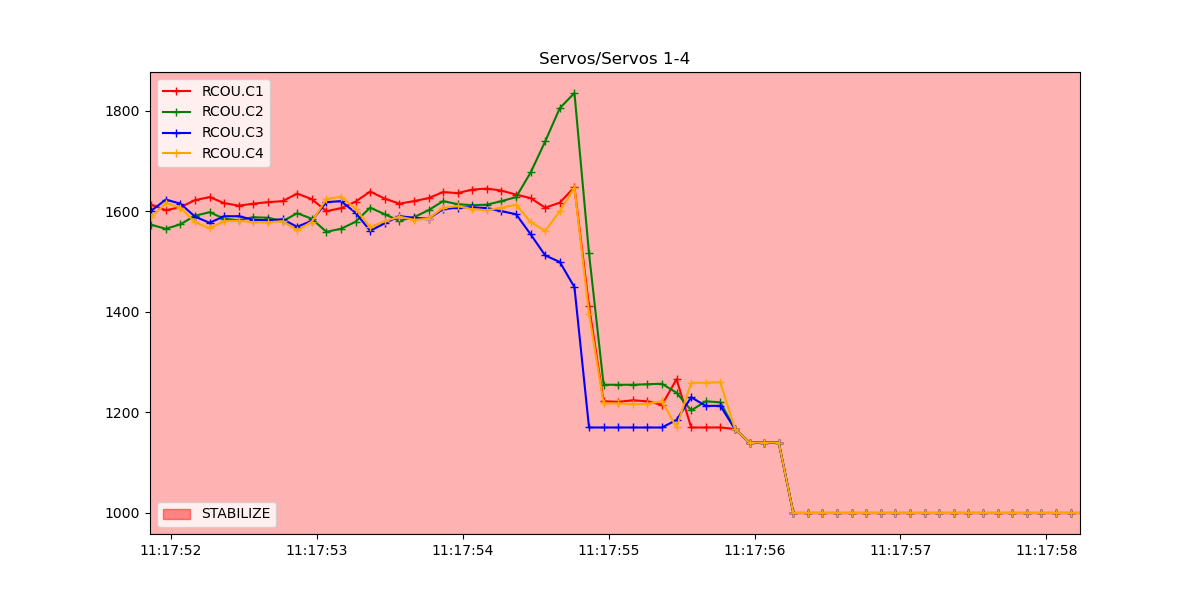
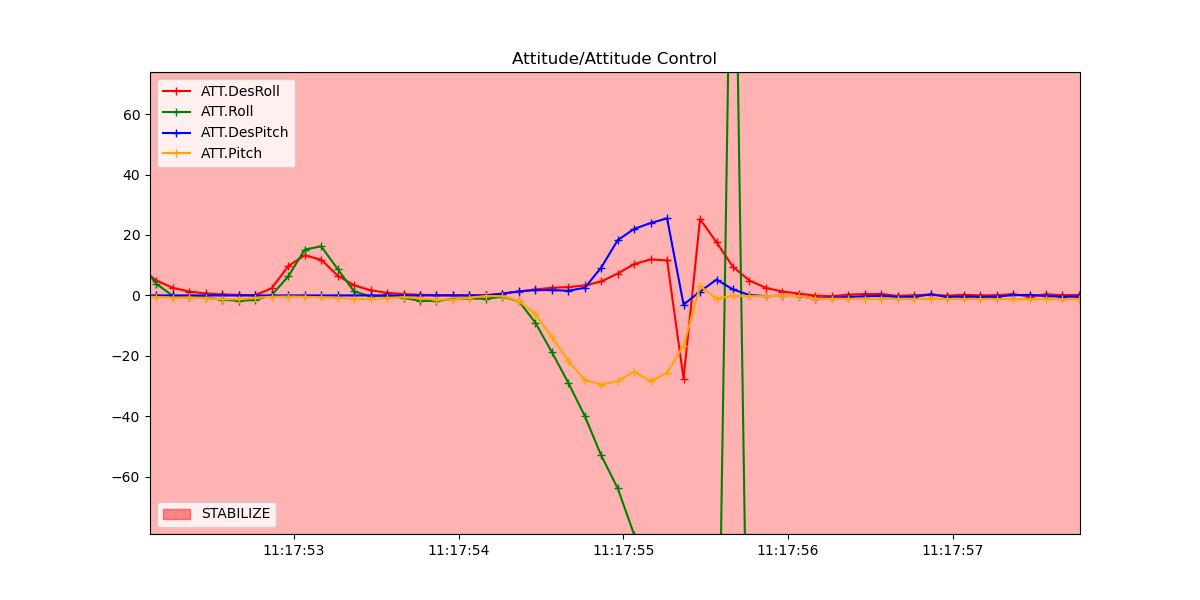
While receiving a light positive pitch RC input, the drone lowered its front-left motor (increased motor 2 power, decreased motor 3) and went straight to the grass.
We scanned the logs to find anything unusual without success, except for an off-set in the Compasses X values, between compass 0 and 1, and a EKF3 yaw-reset a couple of times.
While we are looking into some hardware faults, I thought maybe someone here would have an idea on what happened.
I’m having troubles to upload the log file - I’ll edit this message when I can