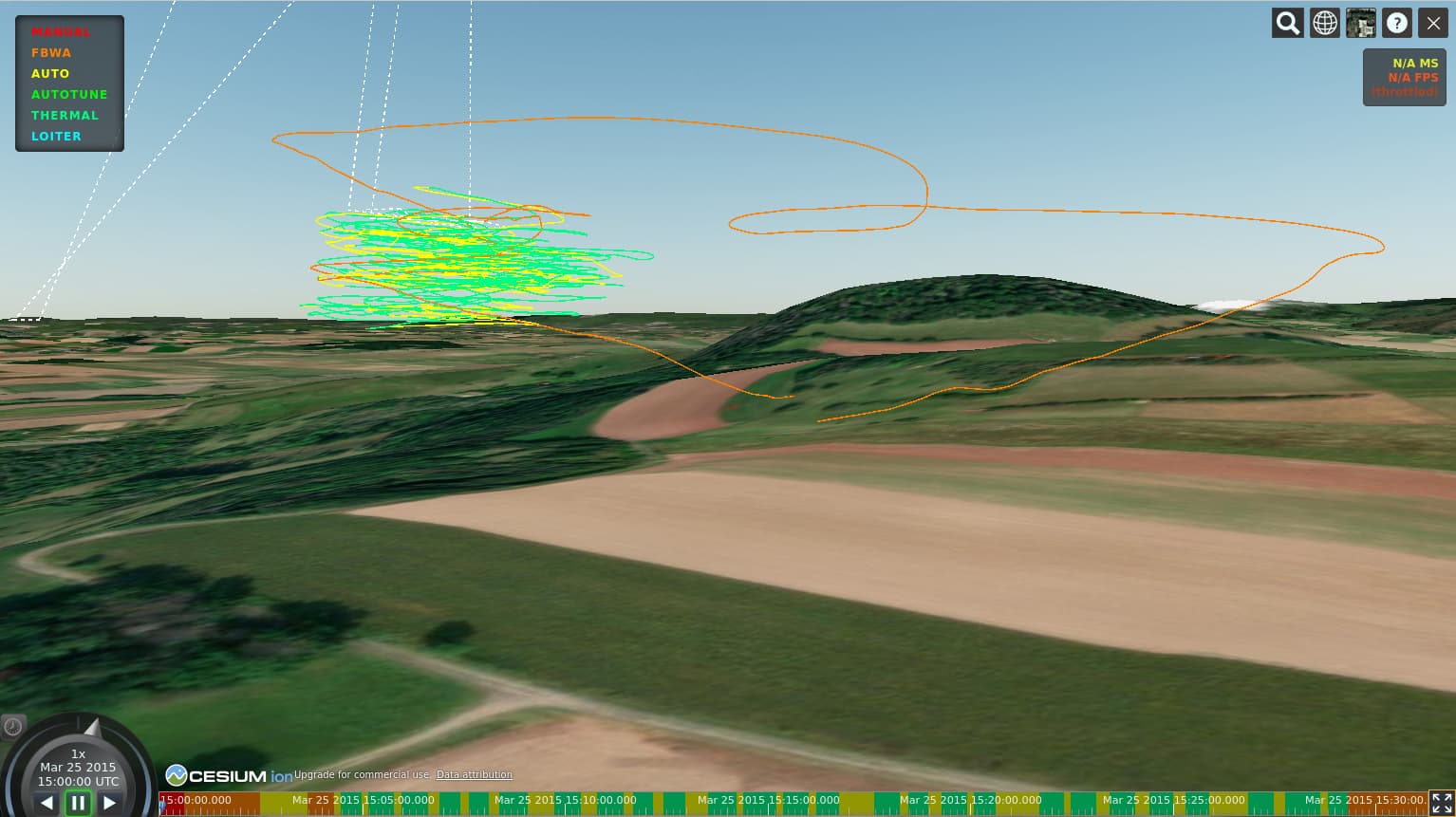
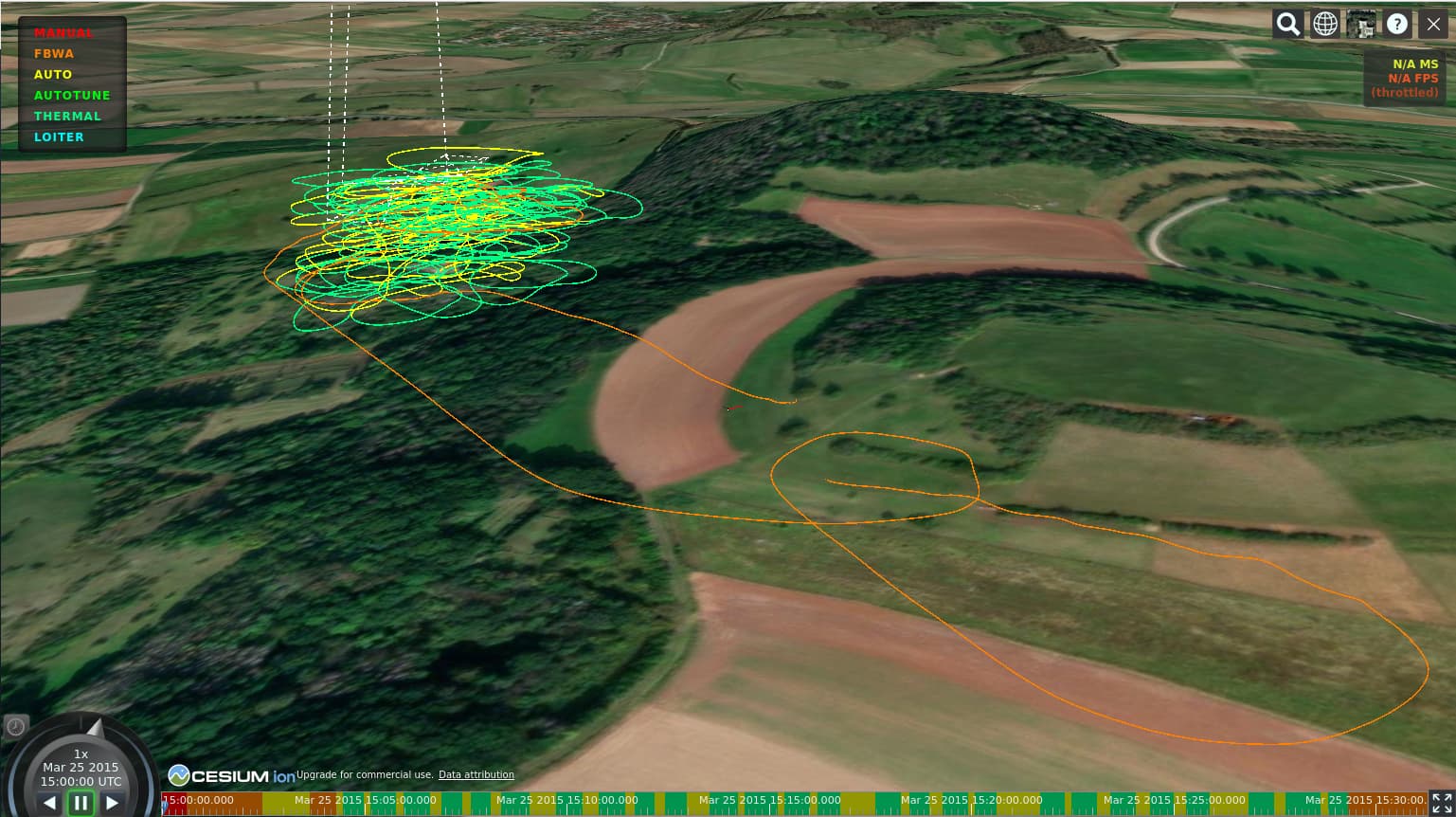
8.October I had a slope soaring of nearly half an hour without moving the sticks. In the beginning in FBWA I looked for the best location I have to relocate my mission to and after switching to AUTO I just have been happy of the brilliant code @Samuel_Tabor developed.
The mean altitude has been around 50m above start.
The mission is a lying eight and my times are since years 20s soaring, 10s auto.
Thanks again to @Aticof for that hint to the log Viewer.