@MagicRuB Hi Tom. Just dropped you a file again. Was intended for @Samuel_Tabor (see post #417) but could not upload normally.
Thanks. Maarten.
Reinhard, thanks for the information. Looked at transferxl and wetransfer but saw no possibility to make it public. So used an old link to MagicRuB. Hopes it still works.
Maarten.
Hi Maarten,
I had a look at the log. I can’t see any obvious issues with the actions of the system. It looks like either the stall was just not recoverable using the control loops, or there was a hardware failure e.g. failed servo.
Hi Samuel, thanks for looking at my log!
The servos functioned right after the crash and today I have tested them with my servo tester. All working well, be it that the aileron servos are rough and sloppy after 200-300 hours of use.
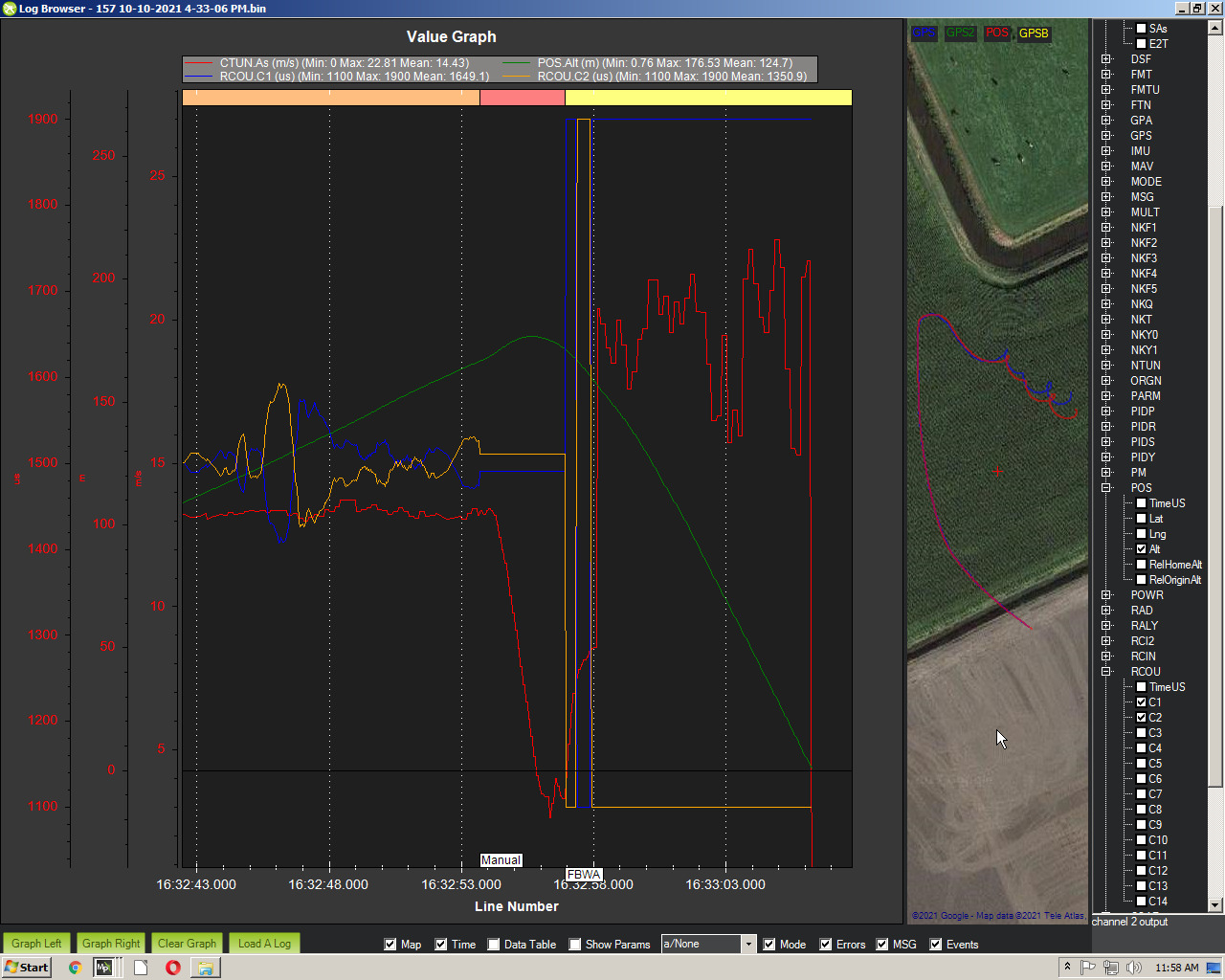
But my AirSpeed (red line, m/s) looks strange to me. When I switched to Manual in an upslope at 180 m(green line, m), the motor stopped and speed came down to 3 m/s. Here the plane probably stalled and I switched to FBWA to recover, should not have done that. The ailerons went full from right-left-right-stayed there. So explaining the spiralling down.
What puzzles me is the analog AirSpeed (red). At 16.32.58 it suddenly jumped from 8 m/s to 21 m/s and stayed very erratic after that.
Conclusion:
- Maybe my analog sensor is not working well, explaining the bad thermalling in the past. I will replace it for a digital one.
- It probably stalled all way down, not recovering as per Arduplane manual has been warned.
Lessons learned:
- On THERMAL a good AirSpeed sensor is needed.
- If in dire straits switch to MANUAL if STALL_PREVENTION =1. Not to FBWA.
Maarten.
If someone else want to look at the file:
To download look at post #166 for file:
157 10-10-2021 4-33-06 PM.bin
Thanks for any help, Maarten.
Hello all,
I would like to start with soaring and I’m willing to buy the Phoenix 2400 to start with and after everything goes well I will implement it on a F5J glider.
The FC is Omnibus F4 Pro, my problem is that I don’t know what to define in servo function in arduplane for a “Full house” glider with all the F5J functions (Crow, flaps, ailerons, etc.).
I will be happy for any help.
Thank you very much
Rotem
What has happened to this wonderful topic? No posts for 7 months. Is no one doing autonomous soaring any longer or was it something else? I for one miss it.
Yes, it is sad that there is no dynamism in this post, today I did the flight maiden, I hope to post results and doubts soon.
SOARING FOREVER…!!!
Hi @Samuel_Tabor, I read in previous posts about WP_LOITER_RAD as the turning radius in THERMAL mode. And I understood that what we configure is SOAR_THML_BANK and the radius is calculated by arduplane.
I understand that WP_LOITER_RAD is the radius for LOITER mode and also the radius for AUTOTAKEOFF but not the radius for THERMAL.
Is this correct or am I wrong?
I don’t understand that to finish THML you have to wait for SOAR MIN HTML S. Why keep turning while descending?
@Aticof
Hi Atico. To my experience it is certainly usefull to experiment with the setting of SOAR_MIN_THML_S. But also with SOAR_MIN_CRSE_S and also SOAR_VSPEED. My settings on a F5J 3.5m gliders (Cirrus, Art Hobby Silent-E, Epsilon) are: 20 sec, 10 sec and 0.2 m/s respectively.
The thermalling works great. This afternoon I made 2 flights of each > 1 hour. I could have flown all day if I did’nt get thirsty.
2 Likes
yes, finally I understood this role. Thanks for your answer. PD: you will have to take one fridge & beers ![]()
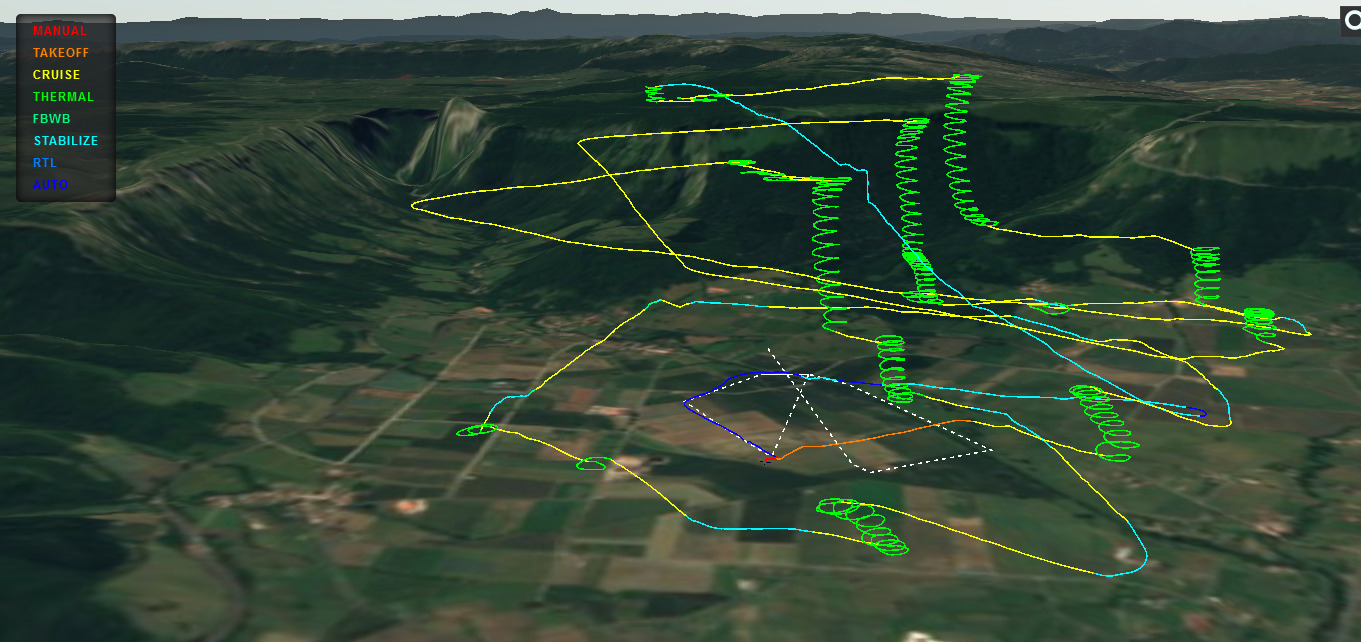
@Aticof What software did you use to prepare that flight-graphics? It’s very good to see the details and interesting regions.
UAV log Viewer > https://plot.ardupilot.org/#/
1 Like
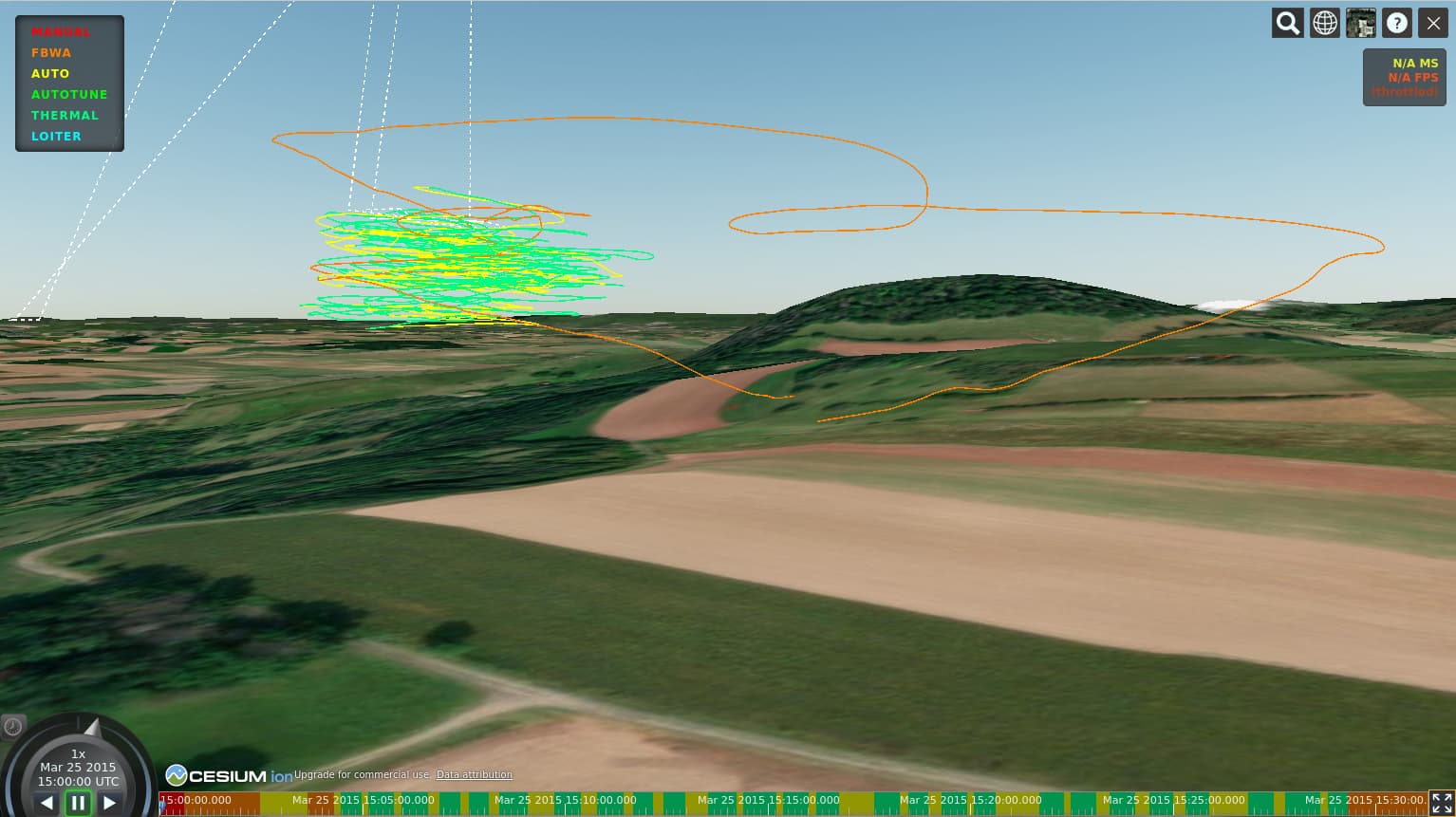
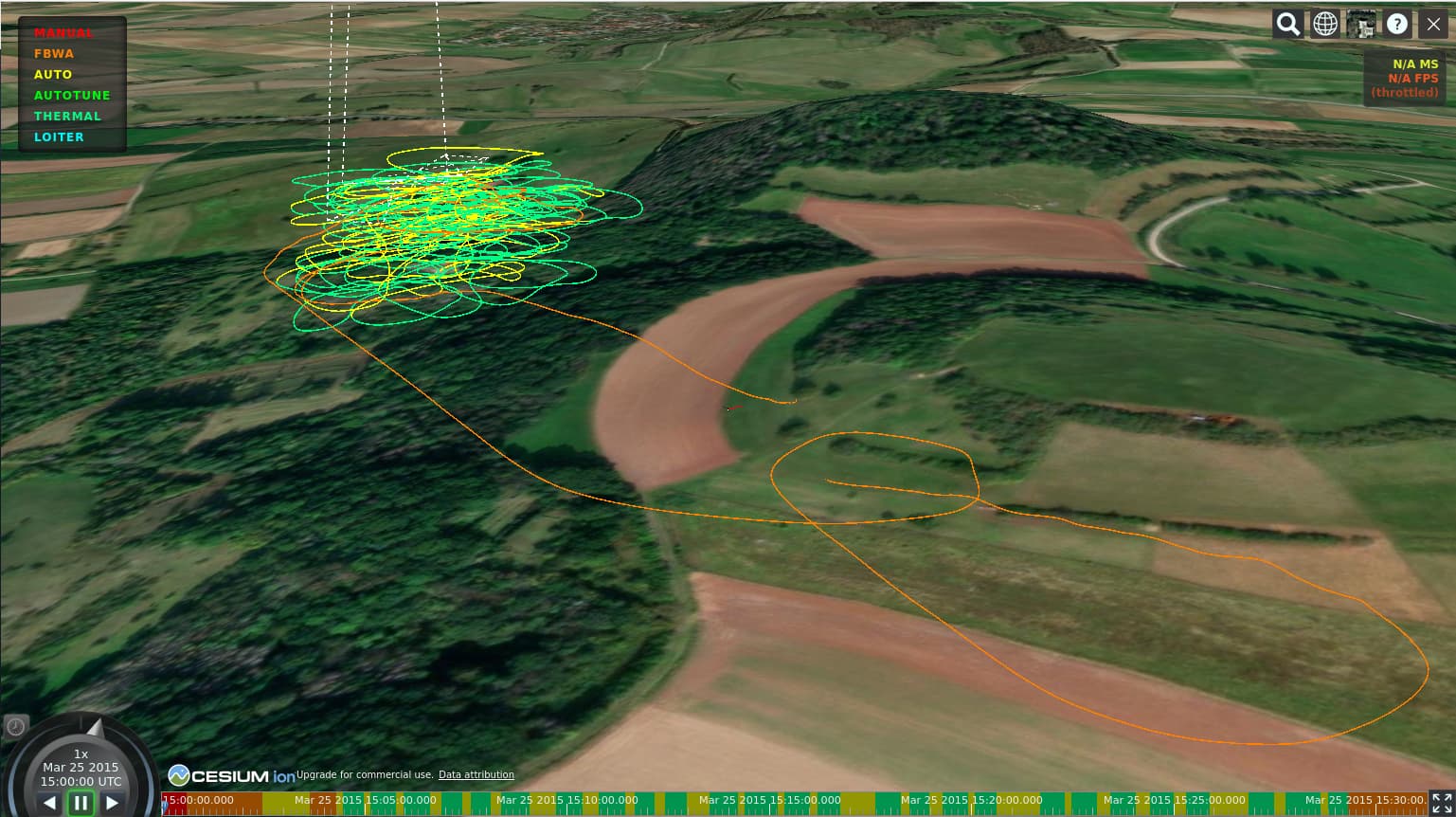
8.October I had a slope soaring of nearly half an hour without moving the sticks. In the beginning in FBWA I looked for the best location I have to relocate my mission to and after switching to AUTO I just have been happy of the brilliant code @Samuel_Tabor developed.
The mean altitude has been around 50m above start.
The mission is a lying eight and my times are since years 20s soaring, 10s auto.
Thanks again to @Aticof for that hint to the log Viewer.
1 Like