To answer your question directly, it appears that your flight controller is seeing an INPUT of 1000-2000 from the Taranis, but the flight controller is scaling the OUTPUT to 1120-1920. This is what you want for the DJI escs
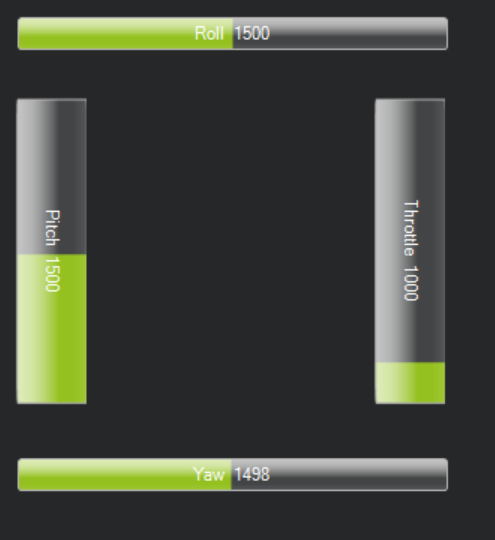
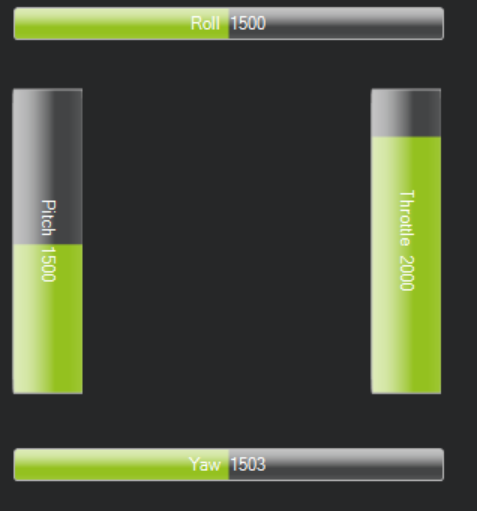
The screen with bars for Roll, Pitch, Yaw, Throttle are the values coming IN from the TX.
The Servo output screen is what the flight controller is sending OUT. This screen will not show any movement until you are flying. It is sitting at 1120 since that is your MOT_PWM_MIN value and I assume the copter is sitting in the un-armed state. IMHO, This screen is not very useful for most multicopters. It is useful for auxilary systems such as crop sprayers, seeders and planes that might have wing servos.
Someone correct me if Im wrong, but I think arducopter scales the full TX IN to the MOT_PWM_ values. So for your case, 1000 IN from the TX means that the flight controller sends 1120 out to the motors. likewise, when your TX is sending 2000, the flight controller sends 1920 out to the motors.
Check out the RC_xxxxx parameters: https://ardupilot.org/copter/docs/parameters.html#rc1-parameters
These values are set bu the transmitter calibration page in mission planner. there is a whole set of params for each channel (ie - RC1_MIN, RC2_MIN, etc). In particular, the RCx_MIN and RCx_MAX parameters control the range of the INPUTS from the TX. Check them on your setup - I bet the _MIN is 1000 and the _MAX is 2000.
You could setup your TX output range to be 1120 to 1920 on your transmitter, then re-calibrate your transmitter in mission planner. This would result in both the INPUT and OUTPUT values being scaled the same, but this is not relevant since the flight controller will adjust the outputs to maintain level flight anyways.
I hope that helps
TL;DR - INPUT and OUTPUT values can have different ranges. The MOT_PWM_MIN and _MAX values set the OUTPUT range and the servo output screen will only show activity once the flight controller is actually commanding the motors to spin. The RCx_MIN and RCx_MAX values set the INPUT range from the TX and are set by mission planner on the calibration screen.
EDIT: about the servo output screen - I think mission planner must not be updating the min and max values in the drop downs there. It appears that your MOT_PWM_MIN parameter setting is working because all values on that screen are 1120. We expect the outputs to be sitting at the min value when the copter is dis-armed. I wouldnt worry too much about the servo output screen, just go fly it!