I’m trying to find a way to send smoothed IMU data from my autopilot to a companion computer. Something similar to the CONTROL_SYSTEM_STATE mavlink message. https://mavlink.io/en/messages/common.html#CONTROL_SYSTEM_STATE.
Is there a way to do this currently?
I mean it does not exist in mavlink message list Messages (common) · MAVLink Developer Guide
Also I havent found it in Ardupilot codebase
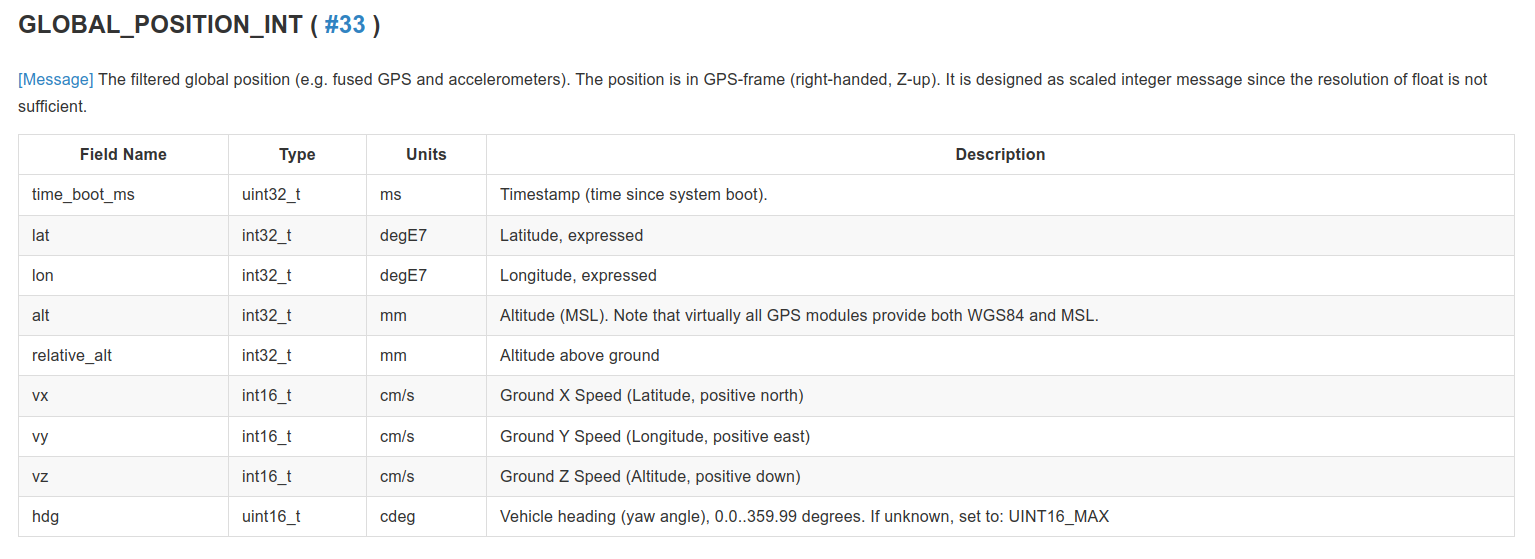
The closest message by name is, I guess, GLOBAL_POSITION_INT, but there is nothing about smoothed IMU data in it (like acceleration)
No problem. Coming to the original question what do you think from this message can be interpreted as smothed IMU data? Also would be great to have something not tighted to GPS data