Fixed-wing aircraft have the ability to RTL automatically if they are out of the Geofence range during flight, but if there is an obstruction on the straight path to the Home Point, it may cause a dangerous situation. So if an aircraft flies out of Geofence’s range during flight, is there a way to return to any route (such as Smart RTL) rather than a straight route like RTL? Please reply. Thank you.
I have the same thought. Maybe the Smart_RTL will be implemented on plane one day ![]()
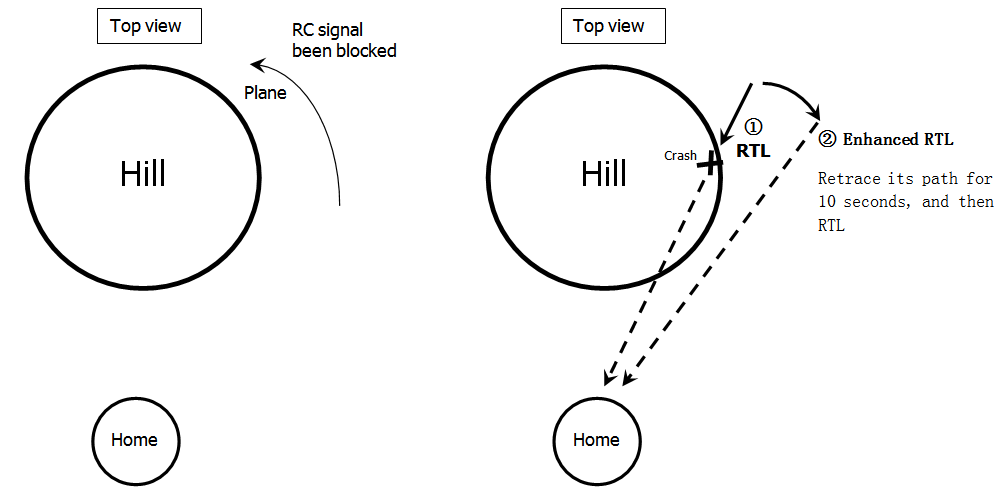
https://discuss.ardupilot.org/t/suggesting-an-enhanced-rtl-which-will-retrace-for-10s-to-avoid-rc-signal-been-blocked/83227
1 Like
The problem is that unless SRTL is triggered during flyback over the charted territory there is no guarantee that navigation will be able to find a path that doesn’t leave the charted territory.
Copter can brake and turnaround. If you weren’t about to fly into an obstacle anyway it is likely to stop safely and return over the mesh. Plane can’t just stop and turn around unless it is QPlane or 3D capable and can do the maneuver in the vertical.
AFAIK plane doesn’t even implement active fence avoidance like copter does.
2 Likes
It might be easier to add a function to make the plane return at the maximum altitude for the entire flight in the FLIGHT_OPTIONS item.
Now there is an item ALT_HOLD_RTL. Which is not exactly what is needed in this scenario.
1 Like