Always wonder why plane couldn’t have something semi_SmartRTL, as in the ArduCoper.
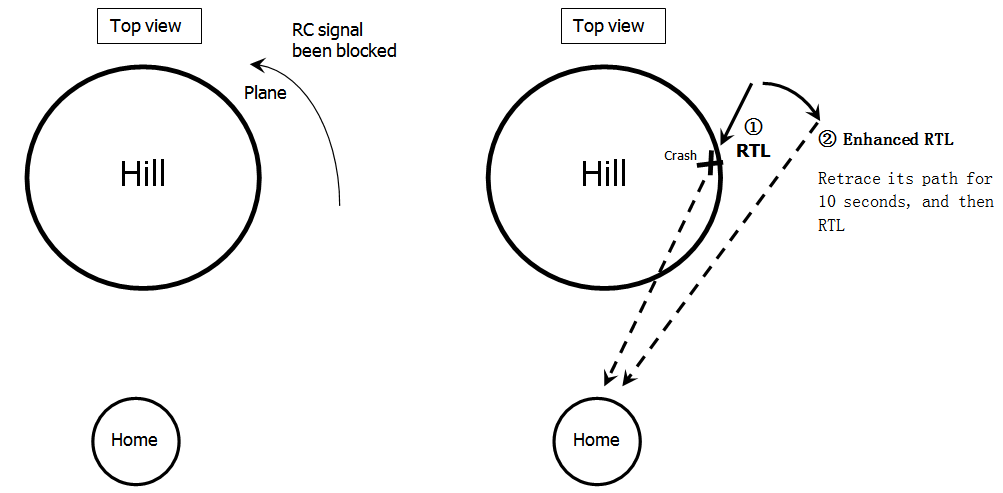
The idea is, when the plane is blocked by obstacles accidentally, it has the ability to get back to regain RC control by retracing for a few seconds. The enhanced RTL don’t need to retrace all the way back to Home point. A few seconds are enough to get out off the shadow.
Semi_Smart, right?
It would be a little terrifying just to rely on circling out of RC signal shadow.
And we don’t know the plane needs a right or left circle.
The best way out maybe to trace its original forth path ( in tight circle to avoid collision) back for some distance where the plane regain signal
Can’t a Lua check for status and in case of fail safe it changes the mission and goes backwards starting from the last waypoint and so on?
Would need to have fail safe to continue with mission and Lua to manipulate the mission.
It is a poor man smartRTL
If you fly back the waypoints in reversed order there is no risk of collision. Updating a safe point could be tricky while a waypoint already flown is safe because plane already flown it safely.
Obviously with a copter you can retrace your flight exactly. With a plane a half circle is normally required and this involves the risk of encountering an obstacle as in the diagrams above. An immelmann would avoid that problem - but not all aircraft would be capable of that manoeuvre.
The idea does have merit (and less risk) when the reason for RTL is loss of signal due to the aircraft flying out of range of the control transmitter - as retracing the flight path could be a more reliable way of immediately regaining the signal than circling which, depending on wind direction, etc, can just cause the aircraft to fly further away from the controller.
Having the idea implemented as an optional form of RTL (whether in a mission or not) has merit in my view.
Indeed, “less risk” is all we need when RTL mode been triggered.
The immelmann manoeuvre definitely can void collision, just kind of power demanding for the FPV plane. Maybe a tighter half circle back is a more conservative solution.
Rally points need to be pre_planned for every mission, and that may become a puzzle
Considering RTL as rescuing hostage. Sneak in, and the same path sneak back
What about gaining some altitude and then doing a split-S maneuver? (Or going straight into the split-S if there is enough altitude margin?) This should require less power than an immelmann, no?
I wonder if we could just tie this into the scripted aerobatics functionality…