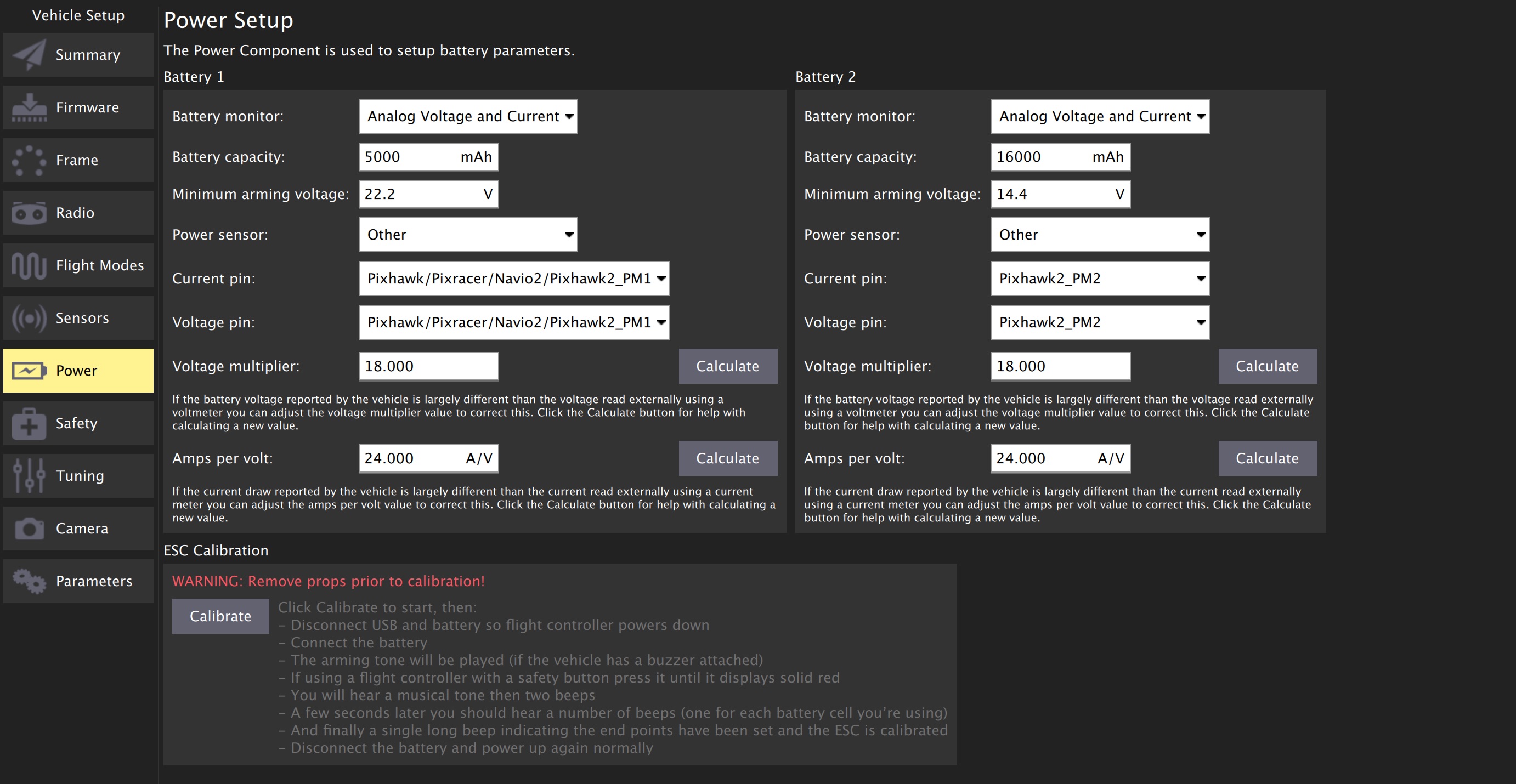
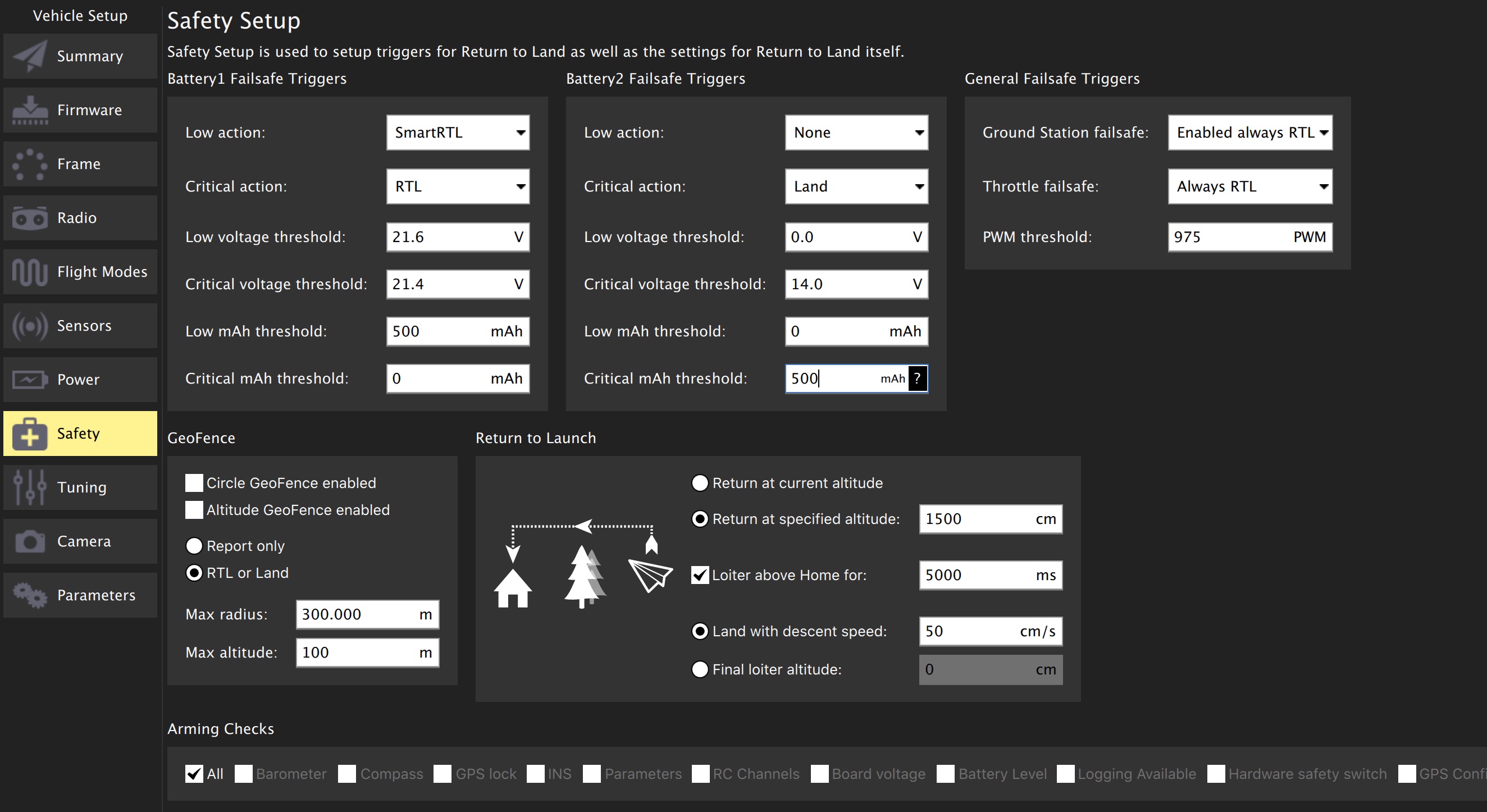
I would still be using the 2 power modules and configure each according to its settings, because we want Failsafe to be triggered by different conditions on each one, and recent versions of Ardupilot allow the use of different settings for each power module connected