The gyros drift (all the time) hence the need to calibrate every boot. If you gyro cal is taking a long time then the craft is not still enough.
The way to disable the gyro cal at boot time is “boat mode” designed to allow boot and launch from a moving platform. You wouldn’t want to use that mode all the time though, only when actually required.
@xfacta
I have done 3D acc calibration again and level calibration too on my CUAV X7 pro autopilot ,but still I’m getting follwing error
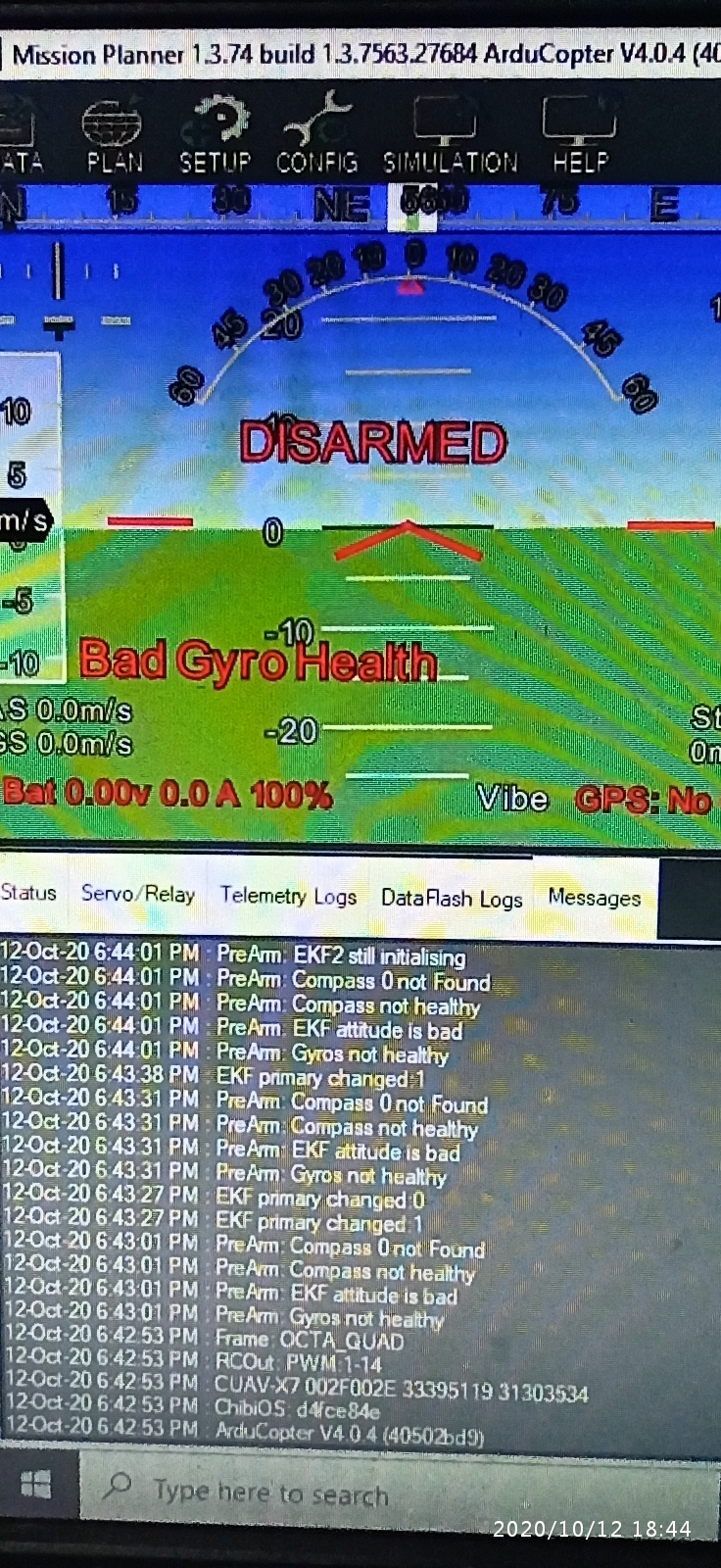
prearm- gyro not healthy
2.prearm - EKF attitude is bad
What does it means .
I have calibrated my acc &level at autopilot internal temp level 62degree, and as you said pre-flight calibration or pre-flight shutdown also doesn’t help here I have tried many times .
Try installing Rover firmware, then back to Copter and run through all calibrations and set up manually - don’t load any old param files.
If that doesnt make any difference you might have to talk to your supplier about a replacement.
My situation, I was tested with 4 units of same board, different lote time, because I am drone productor, and all X7 board have same problem gyro very sensity, I fell this is calibration problem, because only doing when run motors stopped on the table, is very clearly, I am studing to recalibration, my cause is doing only Plane fw, in copter it didn’t doing.