I am one of the first “lucky” owners of Pixhawk 2.1.
Unfortunately I didn’t manage to make it work properly so far.
First of all I had difficulties to complete the Accel calibration. Most of the times the calibration process just stuck, specially if I am doing calibration through the wizard. Other times just says “calibration failed”. The few times that I was able to complete the calibration, I was getting the message “bad gyro health”.
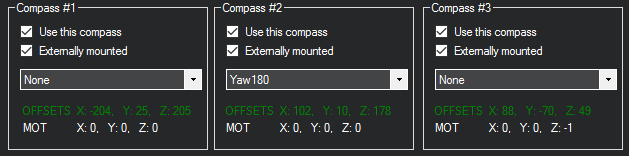
Also I have problem with the 3rd compass. Every time that I am doing calibration is failing.
The only way that managed to make it work without error messages, is when I am deactivating the 1st gyro from (INS_USE) and the 3rd compass.
Although, I can see the values gy, gx, gz, changing when I move the board. The compass readings are changing as well, but the numbers are significantly bigger compared to the other 2 compasses.
I don’t know if the board is defective or is firmware issues.
I tried to fix the problem by formatting the sd card, reinstall the firmware many times, reset to default settings, change PC, change space, change USB cable. The result is the same.
All the test that I have done, are with the board connected with USB and without any other peripherals connected.
I’ve already tried with the all latest stable versions of copter V3.4.2 and plane V3.7.1. The mission planner version that I am using is 1.3.41.
Any idea what might be wrong or how I can track the problem?

 ”
”