Check your MOT_PWM_TYPE
If you’re using a brushed motors, you can follow this and make it work:
https://ardupilot.org/rover/docs/common-brushed-motors.html
What drivers are you using?
Check your MOT_PWM_TYPE
If you’re using a brushed motors, you can follow this and make it work:
https://ardupilot.org/rover/docs/common-brushed-motors.html
What drivers are you using?
If you’re using:
And you have drivers * “Brushed With Relay” is for brushed motor drivers that use a relay pin to indicate whether it should rotate forwards or backwards. Like:
You have to set first
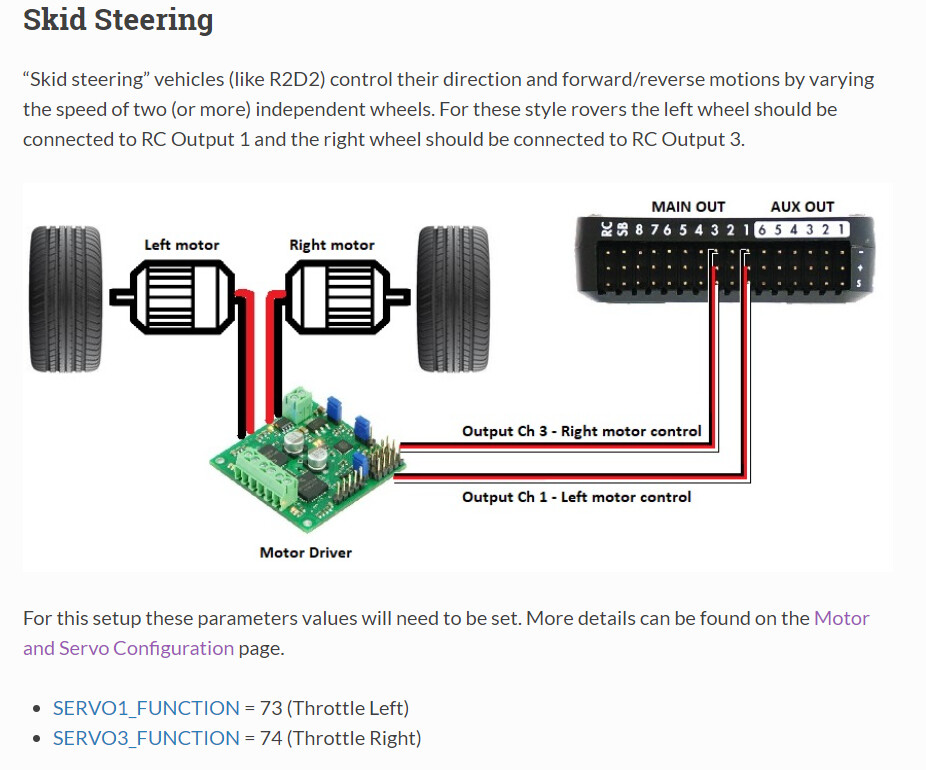
For “Skid steering” vehicles (like R2D2) these parameters values will need to be set:
SERVO1_FUNCTION = 73 (Throttle Left)
SERVO3_FUNCTION = 74 (Throttle Right)
And then
Set MOT_PWM_TYPE = 3 for “BrushedWithRelay”
If you don’t have present safety switch, by default the autopilot set 1 this prearm check, that’s why you will not have any PWM output, so set * BRD_SAFETYENABLE = 0 to disable the switch
In order to to a bench test you can also:
The pre-arm checks can be partially or completely disabled by setting the ARMING_CHECK parameter. The default of 1 means all checks are enabled. If set to 0 all checks are disabled. Ground Stations including the mission planner also allow disabling individual checks.
Please, could you send your parameters of a working system configured as skid steering?