Hello Frank,
We are using two Syi MK32 systems at the moment and want to upgrade our GPS accuracy by using RTK. At the Moment we have Here3+ GPS modules in our drones, which are RTK ready and we would like to use them with Here+ Base Stations. Could you please answer me, if this is possible to do directly via the Siyi MK32 without a laptop? Also how would we connect the RTK base? Via USB-A ? USB-C? another port?
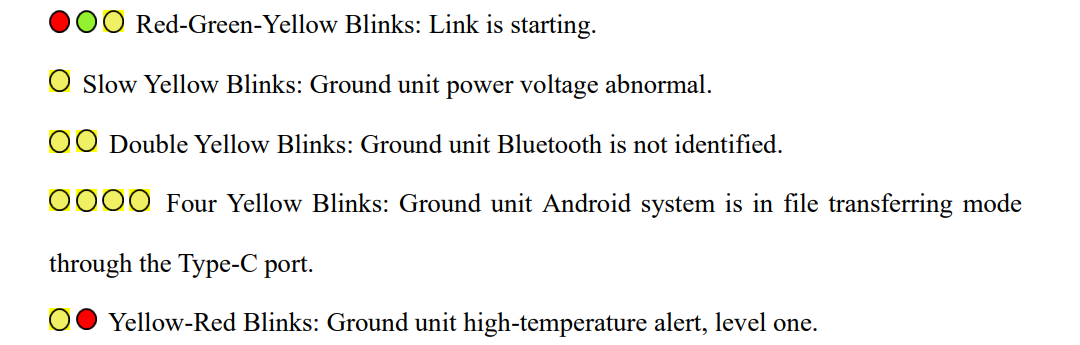
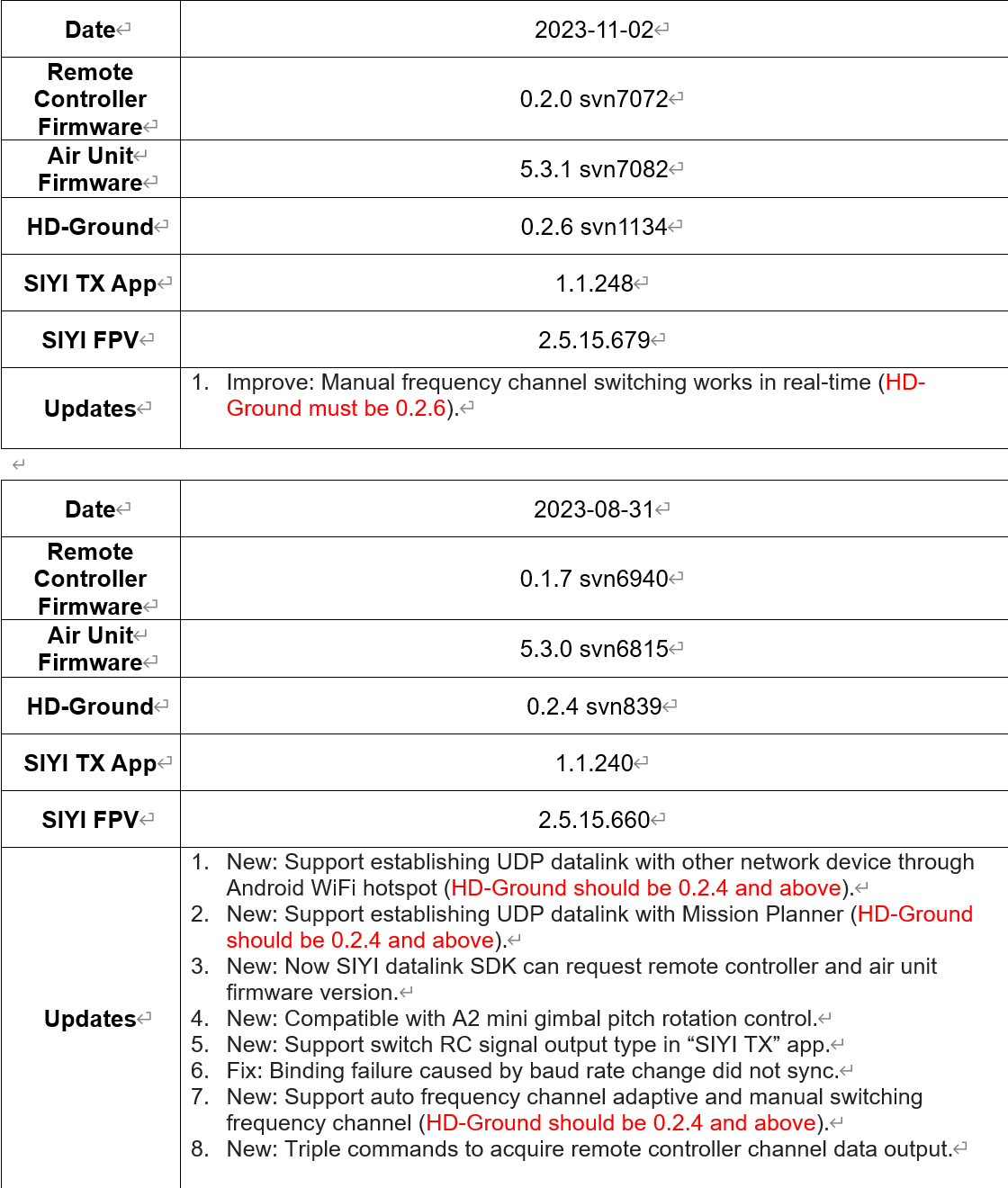
after updating MK32E and airstation to v0.1.7(gcs) and v5.3.0 (air) the connection exists and works and the airunit shows solid green, but the ground station shows triple yellow blinks.
In the MK32E documentation I can’t find any information about this, only double and four yellow blinks are explained.
We don’t know better than our customers on how to use Here+ products. At this moment, we have no instruction for connecting RTK to MK32 remote controller directly. We plan to work it out and update it with the SIYI F9P RTK user manual. Hope it may help you then.
Hello,
Some MK32 user could tell me how to configure the MK32 to have the 6 flight modes for Arduplane.
I have made the query to support@siyi.biz several days ago, but I have not received a response.
Thank you.
Hello,
A few hours ago suport@siyi.biz answered me.
This is his response:
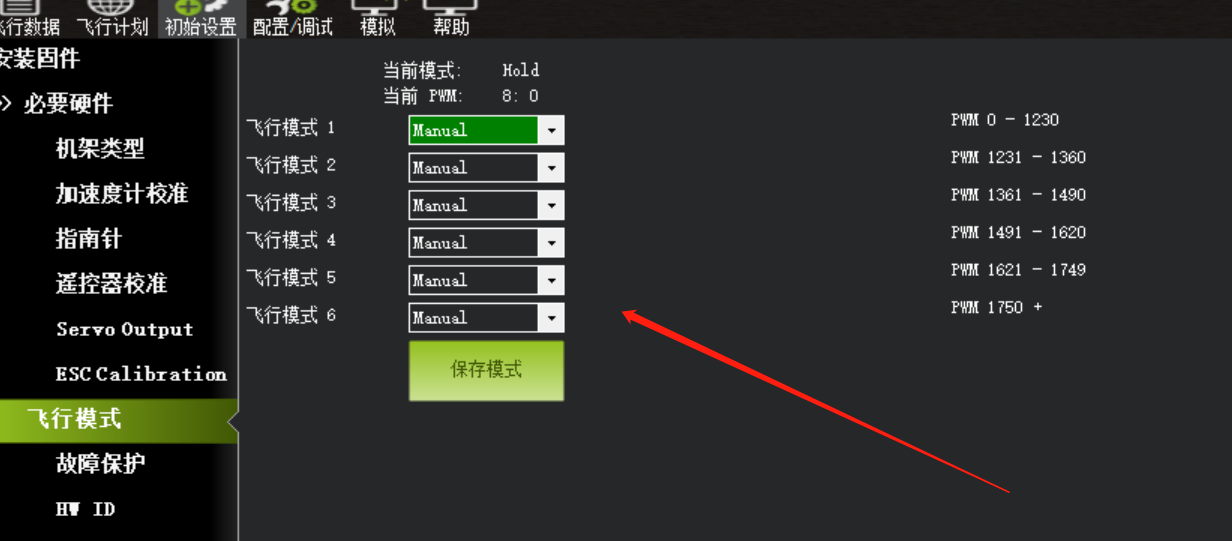
First confirm whether the flight control is an open source flight control or a closed source flight control. The open source flight control needs to set the corresponding channel in the flight control, and then set the corresponding channel on the remote control. The closed source flight control will fly according to the flight control definition. mode, just change the corresponding channel settings. Stabilize (stabilization mode, height requires real-time throttle control) Alt Hold (height mode, altitude hold mode) Loiter (hover mode) RTL (Return-to-Launch) (Home mode: Return to take-off point) Auto (automatic mode: automatic waypoint flight, need to rely on GPS) AutoTune automatic fine-tuning (when the aircraft veers in a serious direction, automatic fine-tuning can be performed) Land landing mode Guided boot mode (the boot mode is not recommended unless necessary) Just set the corresponding remote control channel There is a channel setting in siyi tx. Just define the channel as the flight mode channel. Turn the segment switch of the fifth channel of the remote control (the default fifth channel control mode of the multi-rotor) to see the mode corresponding to each gear. Location, you can pull down to select the flight mode for that location, and then click Save Mode. Taking mk15 as an example, there are detailed instructions starting at 40 in the manual. The following is the manual A three-shift switch can set up to 3 modes
This is the graphic documentation that they have attached and the manual of the “MK15”
Regarding post #60 this should have sorted during April this year: Is the Siyi Mk32 system (ground and air unit etc) CE compliant/approved as of now?
I cannot find any information about this anywhere.
It can be a pivotal point for operators in Europe and the EU regions, for choosing between your system and competing systems.
If the system is not CE approved by now, what is the timeline for getting this done?
Can the approval be applied this to existing older systems after the fact?
It was asked before about flight mode switching in Ardupilot (10. October), but I feel it wasn’t answered properly.
I cannot see any way to mix two channels together so that we can use two 3-way switches to give up to 6 flight modes on the assigned flight mode channel in Ardupilot.
See here for an example: RC Transmitter Flight Mode Configuration — Copter documentation
A future feature for the Siyi TX app would be to add channel mixing, and maybe even logical switches. This would make it easy to do things as the 6 flight modes mentioned above.
Hello rosand,
I agree with you, at least about the channel mix.
Currently you have to use one channel for each flight mode you want to implement, since with the corresponding channel switch you only have 3 flight modes.
Well, you can also use one of the channels with a potentiometer but it is a little difficult to change the flight mode.
Raul.
Tried to setup the MK32 Dual and the HM30 Dual in Dual mode with the MK32 as RC-TXA and the HM as RC-Vice but are unable to get them to work. While they both have link to the air unit, only the MK32 is able to download parameters from either QGC or MissionPlanner while the HM30 is turned off. The HM30 connected to a laptop is not able to download parameters from QGC or MissionPlanner. no video is connected yet. Both work fine when set up as individual radios. - No reply from SIYI about this.
Thank you very much for your attention and your suggestion
At this moment, I cannot commit a schedule for a solution to the requirement. Please trust us that we have seriously discussed about it.
The solution will be either following your suggestion exactly or a better one.
after two weeks of two technicians tring to get dual TX working on these radios we have decided that its not commercially viable to continue. SIYI claim a lot of things but the reality is thjat these are all first generation technology and SIYI have not tested fully. The SIYI gear is seriously lacking and full of bugs. These are not commercially viable products. no wonder why their support are inundated. I have religated all the SIYI dual radios to the trash and reverted to the ried and proven RFDesigh 900MHz radios as telemety links at 1/10 the price.
My advice is don’t wast your money like I have on SIYI. It’s cost me 10s of thounsands of dollars in time (labour costs to my company) to try to get this gear to work as advertised and it simply dose not!
QGC on the MK32 takes 5-10 minutes to load parameters but MP on MK32 takes 20 seconds? why?
Until then, you could make do with a small LUA script that could theoretically switch up to nine modes from the combination of two three-way switches. For my brain, nine modes on two toggle switches is too many, but you can limit yourself.
I have quickly created a demo script for this. Two three-way switches are assigned to the script with RCx_ option = 300 and 301. Each time the switch position is changed, a flight mode defined in the script is switched depending on the combination of switch positions. Personally, switching 9 modes in this way is too much for my brain . However, you can easily rewrite the script for fewer switching options and change the possible modes according to your own wishes. But you should make sure that the RC failsafe function is not affected: It is best to select a failsafe mode with a defined failsafe flag (“Cut”, “no signal” ). Otherwise, it is essential to ensure that the Failsafe switch-positions are triggering RTL in case of a RC-failsafe.
Hello Rolf,
Great work, thank you very much.
I’ll try it, but not in the project I’m working on now that I already have three Lua scripts installed.
Thank you so much.
All the best.
Raul.