Hello.
[Using Envirionment]
I’m using WSL1 to run the SITL.
Because Mission Planner’s internal SITL does not support multi-type vehicle simulation.
I had to simulate Rover(boat) and quadplane, so I choosed WSL, thanks to forum’s expert.
I installed ardupilot directory in my WSL and ran this command on ardupilot directory :
sim_vehicle.py Rover -A “–serial0=udpclient:127.0.0.1:14551” --no-mavproxy --custom-location=“2.48647,-159.45417,0,0”
sim_vehicle.py quadplane -A “–serial0=udpclient:127.0.0.1:14550” --no-mavproxy --custom-location=“2.48647,-159.45417,0,0”
it connects and operates well except below problem.
[Problem]
I have 3 laptop where ardupilot is installed on WSL.
in first laptop, the quadplane’s flight mode can be changed to QHover or QStabilize or QLoiter, but No Quadcopter mode can be controlled by joystick.
in below video, you can see the quadplane can be controlled in “FBWB” mode, but it suddenly does not follow the joystick command after I change “QLoiter” Mode.
in seconds laptop, the quadplane’s flight mode even can’t changed to QHover or QStabilize or QLoiter mode.
you can refer to below video.
[What I tried]
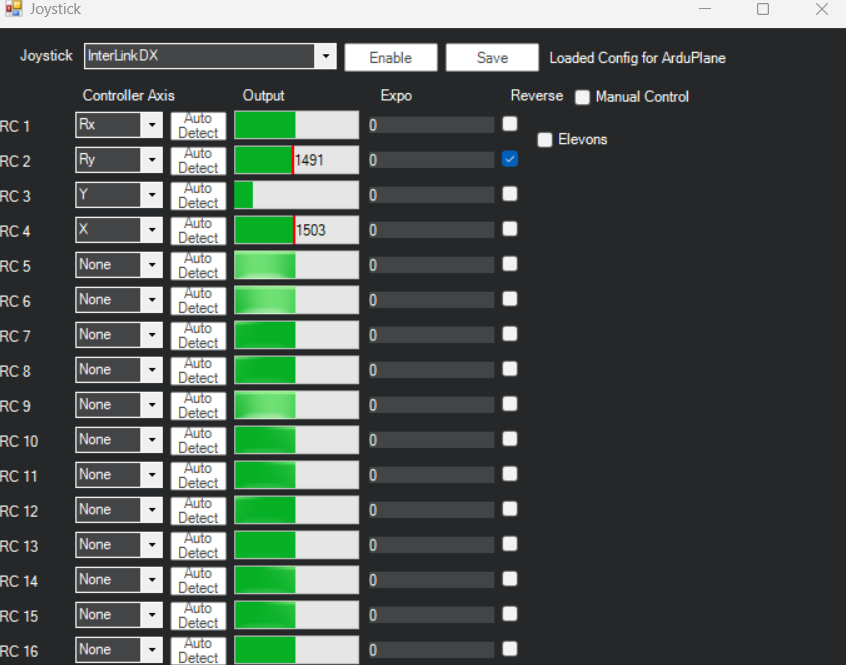
You can refer to my joystick setup.
I tried several channels to control the copter but I couldn’t