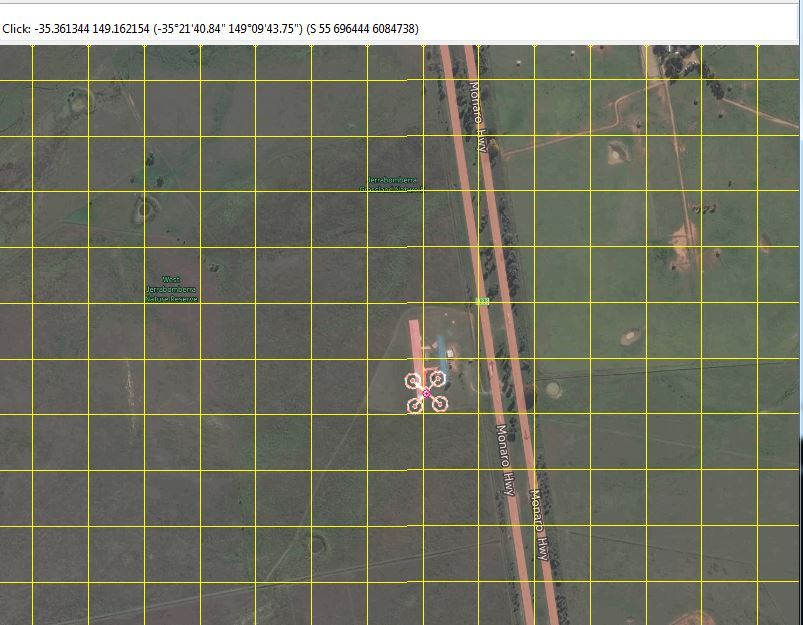
I followed the instructions online, and did the exact same thing on windows. I get the map. However, it won’t takeoff. It says that takeoff started, but Alt is always 0.
Hello,
Did you arm motors? in what mode are you ? only gps mode accept takeoff command !
I changed to mode guided, then typed arm throttle. It says it’s armed, then I type takeoff 40, it says takeoff started. However, altitude doesn’t change.
Could you provide a screenshot or a log? And the command you use to launch SITL ?
I type:
sim_vehicle.py -j4 --map
then I have mavproxy.exe, Cygwin terminal, console, and a map.
If I press enter in mavproxy.exe, it says STABILIZE>, Then I type ‘mode guided’, press enter, it changes to GUIDED>
then I type ‘arm throttle’, then I type "takeoff 40’. Then it says it’s disarmed, I uncheck all, then arm, then write takeoff again. Here is the result: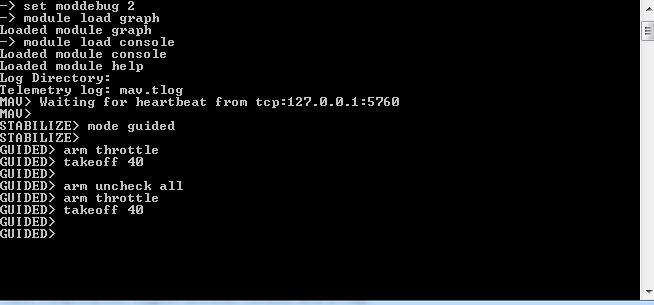
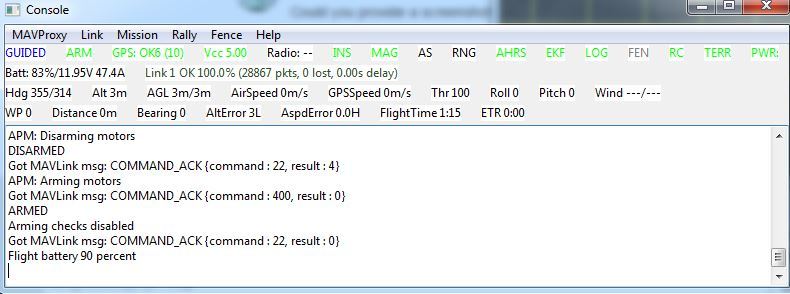
In this case, Altitude changed maximum 3 meters. It didn’t go further.
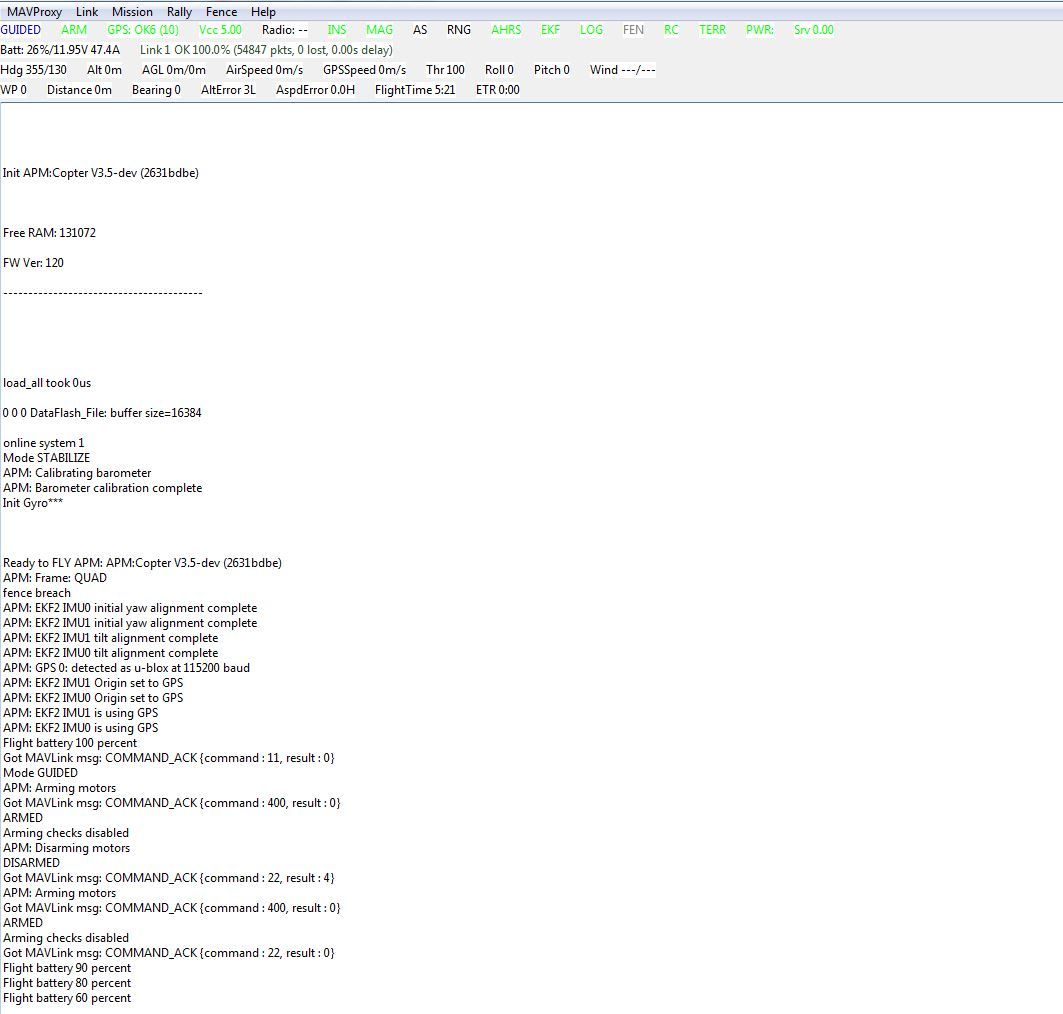
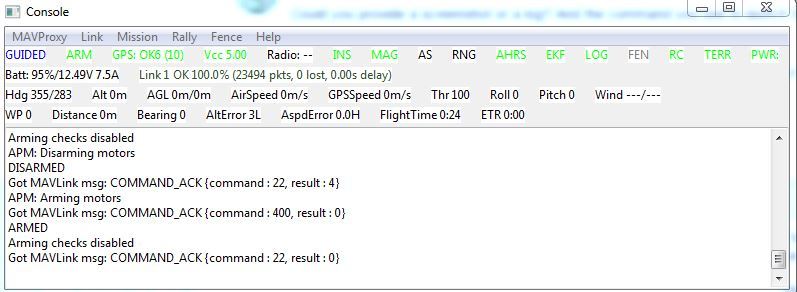
This one is the all that was written in Console.
Hummm… I am unable to reproduce your problem… (but I am on linux)
- you don’t need to remove arming check.
Doing mode guided … wait copter to be ready … arm throttle … takeoff 40 and all should be good.
Did you modify something on the code ? Or in parameter
Try to update the code with git pull master (hummm on windows I don’t know how you clone the repo, but if you have a GUI for git you should have a pull button).
Try to add -w on you command : sim_vehicle.py -j4 --map -w . It will reset the parameter to default, so use it only once otherwise your config will be erase next time you launch SITL with -w