I have also built one of these Benjamin Prescher mono copters. I initially used betaflight but due to my really bad flying skills I needed to add althold mode so switched to ardupilot. I just completed my first flight using ardupilot, and it went pretty well. Although due to the wind it kept getting blown off course and I was unable to correct it so had to dump it several times in the long grass. I am working on improving my flying skills by using a simulator and I bought a small quad which uses the same transmitter to learn on. I think the Alt hold will help me a lot once I get it working properly as then I can just concentrate on hovering in one place using pitch and roll and not have to also control the throttle.
I have certainly learnt a lot and am now fully addicted to this hobby. Building this monodrone as my first experience probably wasn’t the smartest idea, and now I realize there is so much to learn (motors, props FCs, ESCs etc etc).
I 3D printed initially with PLA, but every time I crashed, the top frame snapped around the motor. I then tried PLA+ and super tough PLA, but it always snaps at the weak spot where the spars join the center motor mount. I am currently redesigning this top frame to beef up that area. (I’ll stick it on thingiverse if it works).
I used a recommended motor eventually after failing to get it to work with some cheap 2212 2240Kv motors, I ended up using Racerstar Racing Edition 2306 BR2306S 2700KV and gemfan 6042-3 props, this seems to allow it to hover at about mid throttle with 3S 1300mAH batteries.
As I was trying to do this on a budget I used an Olimex STM32F405 board I had lying around and made some PCBs to handle the connections to the servos and external sensors. As I am an experienced micro programmer I had no trouble building Ardupliot for this custom platform. (although if I ever get it to fly reliably I may splash out on a real FC).
I’m hoping the next flight, when there is no wind, may stay in the air for more than a few seconds  I did notice that when I tried to roll away from the wind it got unstable, probably was saturating the servos, I have a log recorder so I need to analyze those logs. It does like to drift in various directions even without wind.
I did notice that when I tried to roll away from the wind it got unstable, probably was saturating the servos, I have a log recorder so I need to analyze those logs. It does like to drift in various directions even without wind.
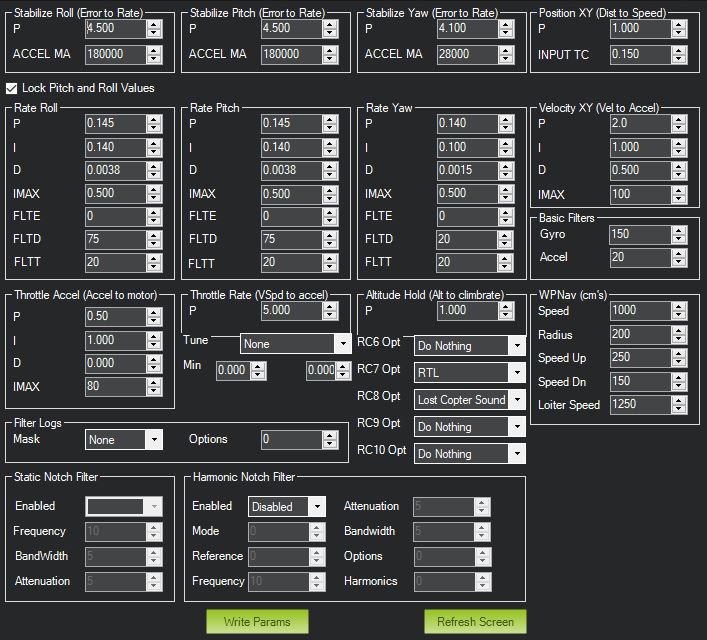
I used 2lian PIDs to start with, but would certainly like to see if anyone has well tuned pids for this model of monocopter. I can’t keep it in the air long enough at the moment to reliably tune them.
Anyone else using arducopter for this monocopter?