Thank you for your answer! This is work well!
Could I ask which parameters I can change to disable the angle boost?
Thank you for your answer! This is work well!
Could I ask which parameters I can change to disable the angle boost?
set ATC_ANGLE_BOOST to 0
http://ardupilot.org/copter/docs/parameters.html#atc-angle-boost-angle-boost
Hi all
I connected my flaps of the device to the pixhawk board according to your shape then I Tested pwm signal of servo output(flap 3) of PIXHAWK 1 BOARD that perform the roll motion for single copter. I send the film of my test in address :
https://vimeo.com/user95410310/review/319004732/de9ca7e168 or http://s8.picofile.com/d/8353052426/26f0c9cf-b349-4484-a2ab-91144ebf250a/video_2019_2_22_17_25_40_784_0jI.mp4
By entering the input roll command with the radio control as seen in the mission planner software, the corresponding output roll signal does not change or is not clearly changed as seen in the oscilloscope and the output of the vehicle’s flap in practice which the input command is not executed well by the flaps.
But when the device is not in ARM mode and board is yellow blinking, the output signal changes in the scope and in the device that is well visible and clearly.
The same is true in flight modes of Althold, Stablize, Acro, and Poshold. We also increase or decrease the control gains and tested it in various Throttle . In the higher Throttle , the output signal changes more clearly but still not so good. What other settings can be made to make better output signals and better Attitude control of roll and pitch in Arm mode of copter?
You will have to arm and have some throttle to get the flaps moving i would guess. Defiantly take your props off to test this.
Yellow blinking usually means its not happy about something. if your connected on mission planner and all your arming check are enabled it will tell you what the error is when you try and arm.
can you help me more?
Hi Dear Leonardhall
I accomplish your advices and other work but that problem (No roll and pitch motion with radio input command) is still there.
Should not the our vehicle center of mass be under the motor for better stability and control roll and pitch? because when base or support of vehicle(i.e the motor) become under of vehicle center of mass It works like a reverse pendulum (In the configuration of our device, the center of gravity seems to be about top of motor.)
Is there other procedure for order pitch and roll command from Mission Planner to single copter?!
hi zujia_huang
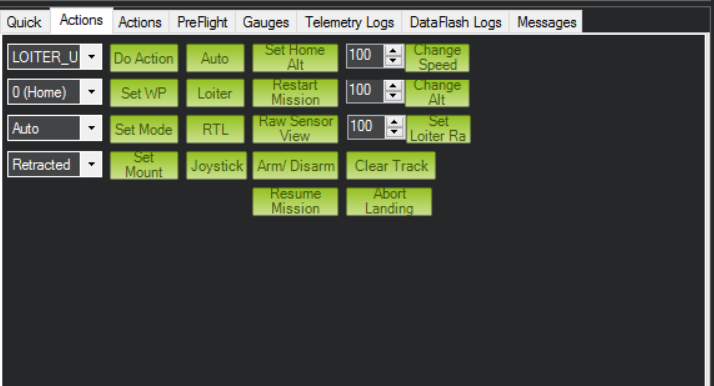
the other procedure for arming your copter is by Mission Planer and from Actions menu and arm/disarm button as bellow figure is showed :
Can you show a video?
Sorry for my slow reply I have been very busy.
This is my addresses of flight tests for roll and pitch and yaw motion :
http://s8.picofile.com/d/8356231000/c97aa92e-daa1-4843-8307-66935050500f/VID_20190228_WA0005.mp4
In all flight modes tests the simple mode state was active.
I can’t download them.
excusme I edit my addresses. can you try again?
https://drive.google.com/file/d/1iOcC4iQIUPrZn5s0Vc7GhU-lbVQ9u6-Y/view
https://drive.google.com/file/d/1_AgoC-IJTCV8D4sTQgY--9TCVCClH3AK/view
Hi @mr.ansari
So the problem is that you don’t have outputs to the servo’s right?
Can you send the log that goes with those two videos?
(I thought the second link was to the log for the first video)
A quick summary of what issues you are having now too please. It has been a while. The video’s look like you have some control there.
https://drive.google.com/file/d/1LNYZNOhq2kbna4r9qouiLeLAihXh3V3h/view?usp=drive_web
This file is my telemetry log from my test flight that associated with VID_20181102_111627_stabilize_yaw_motion video or
https://drive.google.com/file/d/1fzwfFhNWKDubBEZvMaossn-jwkFLPxHS/view?usp=drive_web
Sorry, I need the dataflash log.
Also, what is the problem you are having now?
size of log file is high and I upload it to below link :
https://drive.google.com/file/d/1LNYZNOhq2kbna4r9qouiLeLAihXh3V3h/view?usp=drive_web
at first test when the vehicle is not arm roll and pitch surfaces control work fine but when copter armed roll and pitch surfaces doesn’t work properly and roll and pitch servos starts jitering motion or there is delay in roll and pitch command from radio control to surface control. What other settings can be made to make better output signals and better Attitude control of roll and pitch in Arm mode of copter?
hi Mr.Hall
I’m using the pixhawk and Arducopter ver 3.6.10 and 3.5.5 and 3.3.3 for my single copter. it has Oscillating yaw motion first that This problem was solved by placing number of stators on top of the four fins. but my copter doesn’t perform to my input roll and pitch command ? can you help me for this problem.
my test flight
https://drive.google.com/file/d/1eLdpz1j9WWl2HB5OEs0m7VsWJRAZlZFE/view?usp=sharing
Engage you.
I will need the log that goes with that video.
Unfortunately the pixhawk Autopilot did not store flight data. I tried but I did not find any files related to this flight