Hello, I am trying to make a single rotor drone using pixhawk/arducopter. the problem is, as you all know, there is no builtin firmware for it. What should I do? How and where should I start from?
Hi ali,
Support questions should go into the ArduCopter category. http://discuss.ardupilot.org/c/arducopter. So I’ve moved it. The “Blog” category shows up on the main ardupilot.org’s blog section.
wiki is here: http://ardupilot.org/copter/docs/singlecopter-and-coaxcopter.html
If you use the beta of our next version AC3.5-rc1 and select quadcopter it will support single and coax copter if you set the FRAME_CLASS parameter to “8” or “9”.
-Randy
Hello Randy,
Firstly, sorry for not posting the question in the right category. I am totally new to this forum.
Secondly, can you please tell me how can I install this new AC3.5-rc1 on my arducopter? I have arducopter 2.8 and also pixhawk px4 2.4.6.
Ali,
No problems.
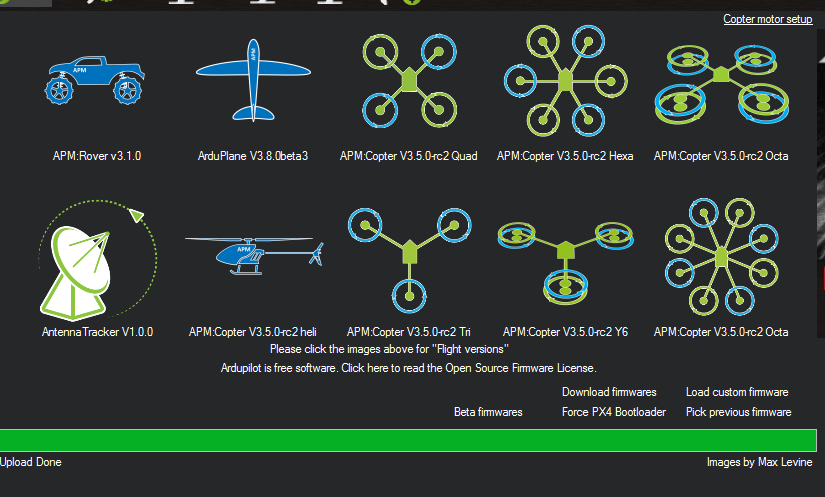
So the way you get the beta depends a bit on the ground station you’re using. If you’re using Mission Planner then under “Initial Setup” there’s an “Install Firmware” screen. On the bottom-middle of that screen there is a “Beta firmwares” link. Click on that and the versions under the icons should change to “xxx 3.5-rc1” or “xxx 3.5-rc2”. Those are “release candidates” for our next version, AC3.5. Connect the Pixhawk with a USB cable and click on the Quad icon and it should install. This same thing can be done with QGroundControl but I’m unsure of the exact buttons to push.
You can also directly download the “xxx-v2.px4” firmware from here: http://firmware.ap.ardupilot.org/Copter/beta/PX4
The single copter code won’t run on the older AVR boards (i.e. APM2.x). We ran out of memory and flash space nearly 2 years ago for those boards.
-Randy
Thanks for your help Randy!
the only option i am getting is APM:Copter V.3.5.0-rc2 quad. Is this for Single Rotor Drones?
One more thing. I am not getting the mandatory hardware option, where i could set the frame type to 8 or 9.
Ali,
Yes, the AC3.5-rc2 for Quad is the one to use.
Can you try with the beta version of the mission planner? Hopefully below helps.
- Help->Check for beta updates.
- Config/Tuning->Planner->Layout:Advanced.
There should be a new screen to set the FRAME_CLASS parameter or it can be set through the Full Parameter List or Full Parameter Tree screens.
Hi Randy,
I need a little help.
- how do I find the initial, neutral position of the 4 servos?
- the fins sometime do not come back to their initial positions after the roll, pitch or yaw sticks are moved. I have to move the sticks in the opposite direction to bring them back in center position.
- I am having trouble in balancing the torque. I think that the fins i have attached are smaller. how should i calculate the area of the fin needed?
help me here please!
hi, have you solve these problems?
Can single- copter 3.5.2 be used properly?