Building a single copter with 4 servos and thinking of using a Omnibus F4.
Will I need to add a compass to this build as this FC only has Baro onboard.
Thanks
Joe
According to my experience (with a coaxial copter, but that should not matter) you do can fly without a compass. You will have to tweak some bits in arm checks, but flights are indeed possible (and in my case, not very terrible).
However, you may want to add it later (e.g. by adding a GPS+compass unit), since having a reliable source for yaw will prevent yaw drifting that may be small, but is inevitable when using only gyros.
1 Like
Thanks Maxium, This is what I thought and I know of the chages to allow arming,and compass use in parameters but saw nothing one way or anoter on a specific requirement for compass use on a singlr copter frame… I am was planning to add a GPS/compass eventually , but will have to sort out where to mount it on this frame. I want to see if basic flight works OK first.
Hi Joe, I think we have a similar project SingleCopter of Benjamin Prescher on Ardupilot
I am currently making it work with Betaflight and no compass or barometer is necessary. I think that with ArduPilot it will be possible to make it work without both as well.
1 Like
Juan,
Thank you for responding.
Yes! Same project. I 3D printed frame months ago after seeing a Hackaday article and just now getting assembled.
The Ball-Drone Project MK II | Hackaday.io
I asked on the Audropilot site last night and someone confirmed that the Aurdopilot software will be OK with out compass. Possibly a little yaw drift. I can add a compass later if it flys under Audrropilot. I have no experience with
Betaflight so I decided to do things the hard way!
If I have issues with the Omnibus F4 Pro I can always try one of my Pixracers for the Flight Controller.
Take Care, and best of luck to you with your version.
Joe
Mail](https://go.microsoft.com/fwlink/?LinkId=550986) for Windows 10

Exactly, I also guided myself from that publication with the idea of doing it with ArduPilot, but I had some problems with the chosen ESC. Benjamin Prescher used a modern flight controller and not compatible with ArduPilot, but I can confirm that the F4 works very well, you just have to adjust the PIDs until stable flight is achieved, and correctly map motors and orientation.
I don’t like the design of the drone, the center of mass is too high.
Tell us how, I already asked for a compatible ESC to explore with ArduPilot!
Hi @JoeBreznai
I too am working on the same project and I’m using a pixracer R15 with ardupilot. It is a challenging project but I am very impressed with how far I’ve come with the project. Initially it was a nut case and very unstable and uncontrollable but as soon as I started tweaking the PID values it started getting better. I also had to reverse the pitch on my radio transmitter and tweak the AHRS_TRIM_X&Y values in mission planner to counter the roll and pitch drifts. My single copter now flies much better but not super smooth yet. Stabilized is the only flight mode that I’ve been using. I plan to try Pos_hold later on. At the moment I have no GPS on my ball drone.
1 Like
@Nonny Glad to hear yours is doing OK. Would you like to share your current PID’s? A screen shot of that would be helpfull as mine is flying but I think I am way off the mark. I have a pixracer as well that I was going to put in it or the next one as i have parts printed for another. Mine flies OK with GPS and compass so far in Loiter as well.
Thanks
Joe
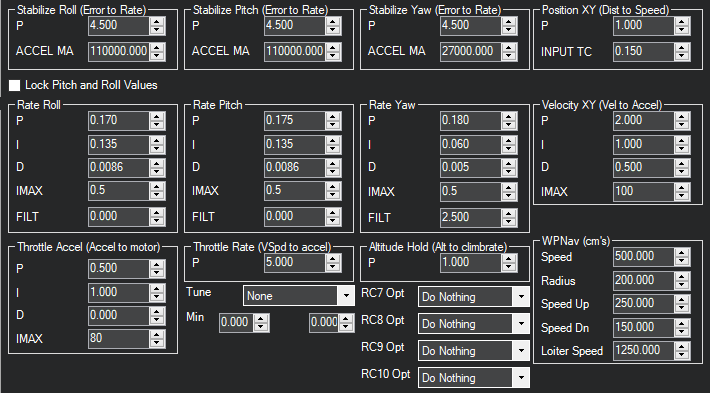
@JoeBreznai sure. I’d love to share them. I also wanted to share a video of the flight but I was unable to select videos…only pictures. The flight was pretty good in stabilized mode without gps and compass. I coupled the drone last week Monday/Tuesday and have been tuning it since then.
1 Like
Thanks, I have been on either side of these setting but I think I will try yours and see what happens as I get a lot of servo saturation on one channel on mine.
1 Like
Alrighty! and success!
@Nonny Just wondering what version of ArduCopter are you using with the PID’s you shared above?
Any updates to this. I have been down for a couple of weeks with other things and thought I may be able to try your set up this weekend.
Thanks, Joe
Hi @JoeBreznai
I am really sorry about the late reply.
I am using version 4.1.0
I’ve done some extra tuning on the copter to eliminate the little
yaw oscillation I was experiencing. Now the copter stays pretty still in the yaw axis.
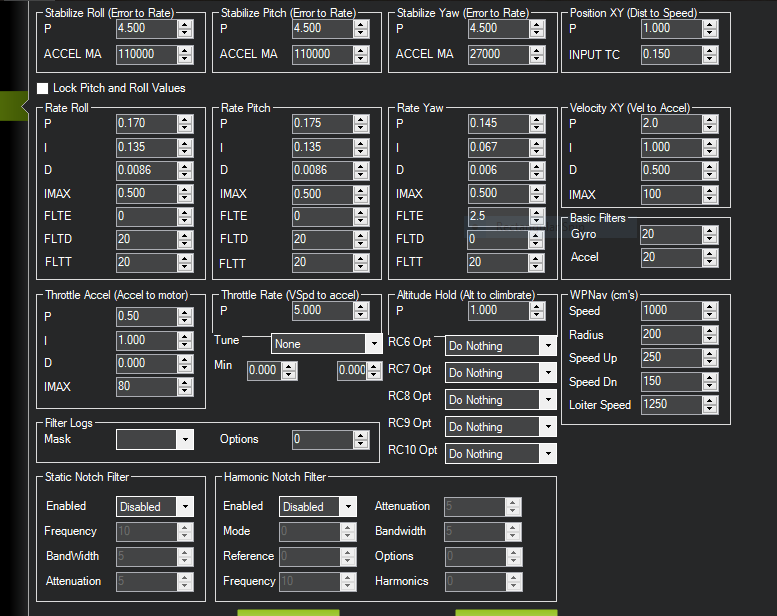
I have not done any throttle tuning yet. The throttle does not sound good. Althold mode is not so smooth but Poshold and loiter with optical flow are kinda smooth. I have never had to tune throttle before in any copter I have built and so I am a bit reluctant to dive into it. Below are the new PID values for pitch, roll and yaw.
@Nonny
Thanks- NP on timing as my schedual has been a mess for the last few weeks. My Yaw has been good in Loiter and Satbilze, but i did a lot or rework to get rid of slop in the control vanes. These small ceap servors are not the best either. Never payed with flow controll but that sound fun. Ditto on throttle management, never messed with. These are my Yaw settings.
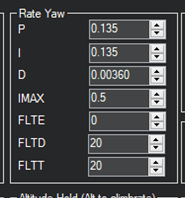
Maybe motor thrust expo settings are involed as I did increade mine, but probably has more to do with my motor i am using.
Thanks again and i will report any progess as well.
Joe
1 Like
Alright @JoeBreznai
Thank you very much. I have been pretty slow myself. I am looking forward to your updates.
1 Like
Hey guys, similar problems with yaw here, except they’re more pronounced. I had been diving into filtering and In-flight FFT dynamic gyro noise filtering but now I’m thinking yaw PID tuning might solve my issue.
1 Like