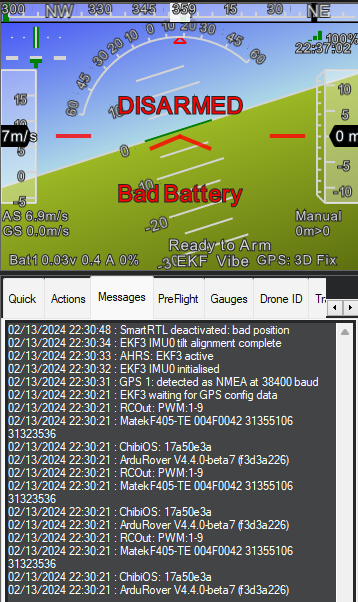
I am trying to simulate GPS with an usb-uart converter and nmea (RMC and GGA sentences are used) simulation software. ( nmeasim package for python). But the ardupilot for some reason won`t align the heading with GPS cog vector, despite a high velocity 7 m/s. And ground speed is always zero (blinking periodically with right values). The compass is disabled and not connected. ArduRover v4.4.