Hello,
I am trying to build a very simple skid-steer robot to help people learn about building and operating robots. The robot needs to be simple (for the user) and as inexpensive as possible.
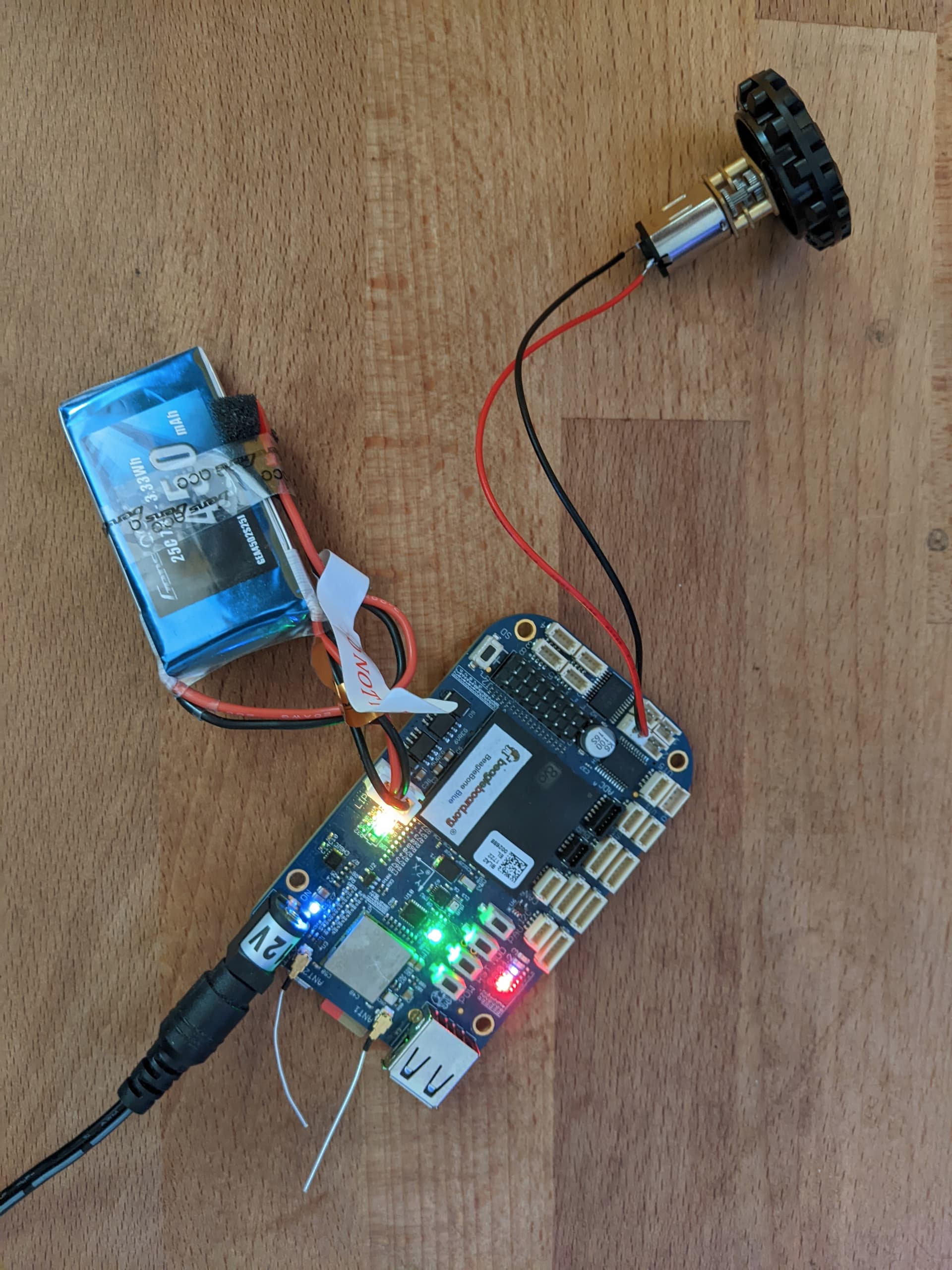
I currently have a BeagleBone Blue running ArduRover 4.1 and I can connect and arm the rover through mission planner. The current set-up is very simple: the BBBlue, a single motor, and a battery. Using the Robot Control Library command: rc_test _motors –s 0.5 I know the motor works.
I would like to run the DC motors using the onboard drivers as this keeps complexity down (for the user) and keeps things cheap as I do not need to purchase additional controllers. I understand from a previous post that the controllers are not well supported on Ardupilot?
Unlike the other user I am not attempting to run encoders with these motors, I just need them to work through ArduRover. I do know the physical motor controllers are Toshiba TB6612FNG controllers.
If anyone could offer advice or point me toward specific documentation I would really appreciate it.
Thanks in advance.