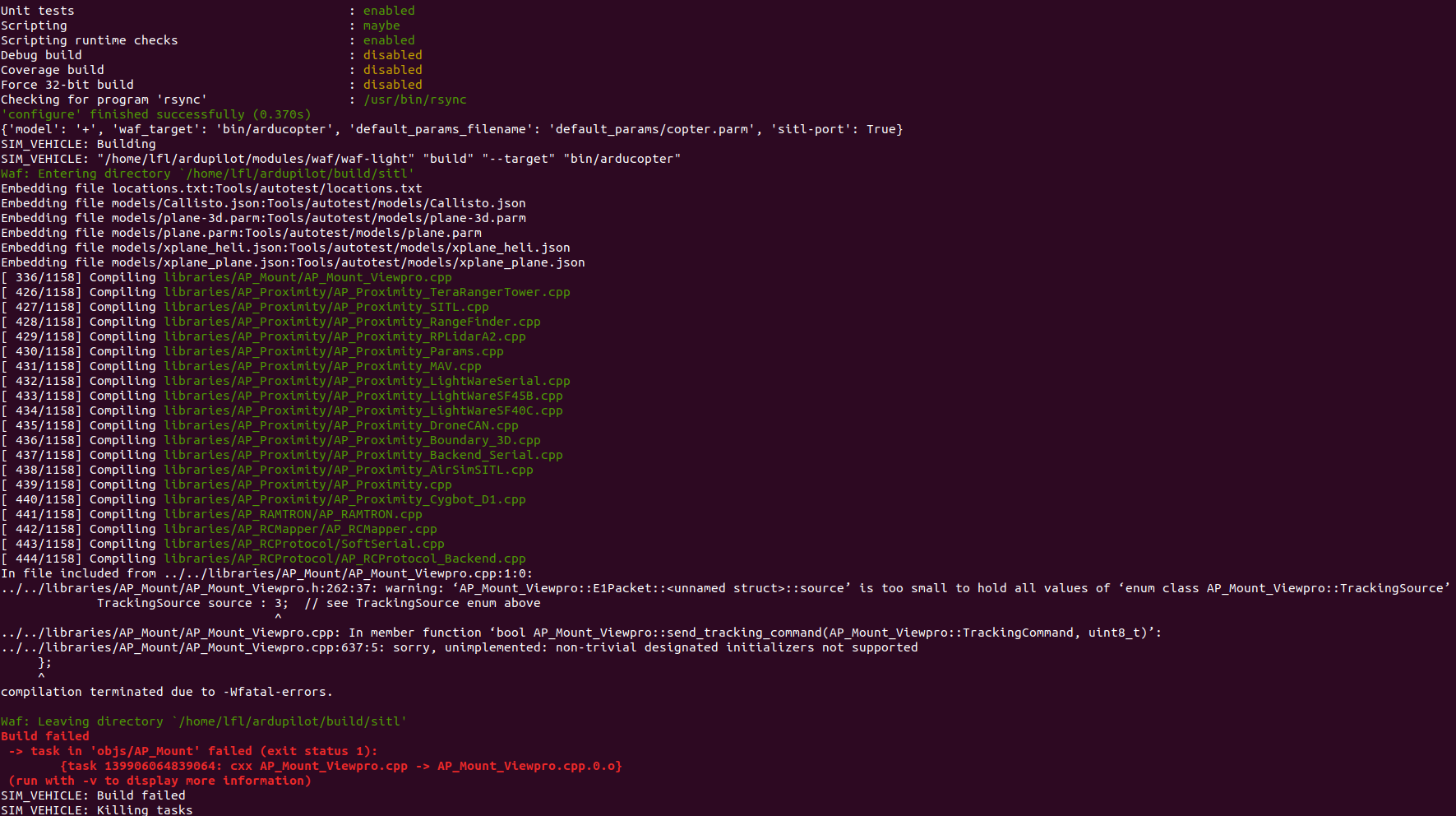
Hellow there: After solving a series of problems,I tried running " cd ~/ardupilot/ArduCopter; sim_vehicle.py --map --console" in Ubuntu18.04,but unluckily it didn’t succeed and just showed tips below:
In file included from …/…/libraries/AP_Mount/AP_Mount_Viewpro.cpp:1:0:
…/…/libraries/AP_Mount/AP_Mount_Viewpro.h:262:37: warning: ‘AP_Mount_Viewpro::E1Packet::::source’ is too small to hold all values of ‘enum class AP_Mount_Viewpro::TrackingSource’
TrackingSource source : 3; // see TrackingSource enum above
^
…/…/libraries/AP_Mount/AP_Mount_Viewpro.cpp: In member function ‘bool AP_Mount_Viewpro::send_tracking_command(AP_Mount_Viewpro::TrackingCommand, uint8_t)’:
…/…/libraries/AP_Mount/AP_Mount_Viewpro.cpp:637:5: sorry, unimplemented: non-trivial designated initializers not supported
};
^
compilation terminated due to -Wfatal-errors.
Thanks for your advise and excuse my late reply. last night,I just followed the tips from my terminate,finding that the real problems are in ~/ardupilot/libraries/AP_Mount/AP_Mount_Viewpro.h:
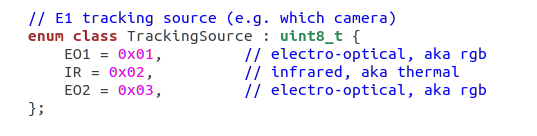
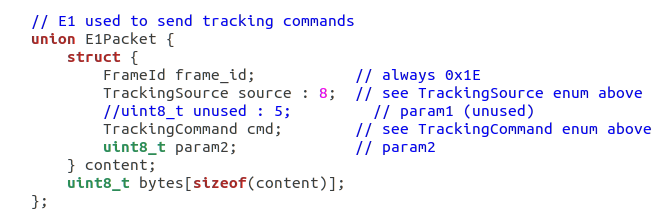
1.TrackingSource source : 3; ------>>>TrackingSource source : 8; // see TrackingSource enum above(because of “enum class TrackingSource : uint8_t{}”,it actually needs 8bits at least instead of 3bits,I guess)
2.uint8_t unused : 5------>>>I deleted all “unused”; // param1 (unused)(the members in structure need claims in sequence,but the use of these structure in this file ignores the “unused”,which will cause error)
ps:changing the value to <=7 doesn’t work too,and I can’t understand if here other uses of these"unused".
Finally,this solution can make it successful,but I can’t figure out whether my solution is right actually and it is because mavlink version or not(>_<).